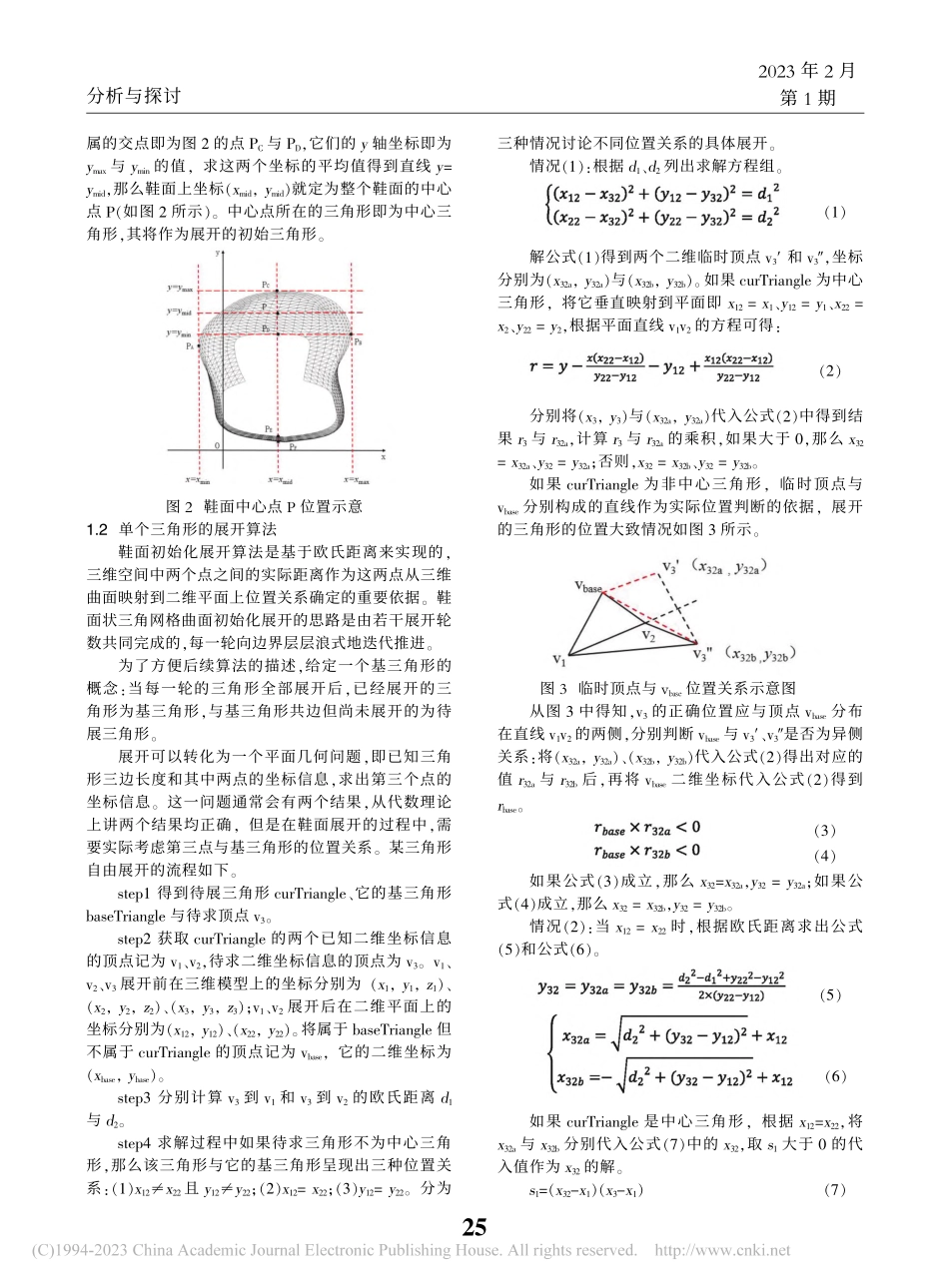
2023年2月第1期经编提花鞋面是一种被广泛应用于运动鞋的针织面料。一只运动鞋的鞋面在空间中是三维曲面,而在织造时是一块完整的平面织物。生产实践中,为实现提花图案的精确定位,面料企业有将运动鞋三维曲面模型展开为二维鞋面图的需求。曲面展开技术多应用于产品设计领域,许多产品实物结构复杂,直接展开的可操作性较低,通常是数学理论上的不可展曲面,展开结果与预期相差较大。复杂曲面展开算法的研究起始较早,1980年Manning[1]提出了一种基于等距树算法的曲面展开的方法并通过计算机将其应用于制鞋工业中。随后,Wang[2]、Li[3]等众多领域的学者都对不可展曲面的展开技术进行了深入的研究,这个研究方向受到了多个领域的学者青睐,陆续研究出了多种不可展曲面的展开方法。毛昕等[4]讨论了复杂曲面采用分治思想展开时,初始展开三角形的选择影响着曲面的展开结果;Sheffer等[5]提出了一种曲面参数化展开算法,他认为展开角度不变可以大大提高曲面的展开质量,结果证明,该方法可以有效减少展开结果中三角形的折叠或翻转现象,但该算法易积攒较大的误差且时间复杂度较高。陈动人等[6]提出了一种分片展开的方法,但这种方法的使用有一定的局限性,并不适用于无法进行切割的复杂曲面。Olga等[7]则提出了搜索中心三角形,随后迭代地展开邻域三角形,并蔓延式地将曲面完全展开,这种方法对于曲率较大的部位展开结果会存在断裂或折叠的现象,可以通过约束展开,约束展开优化等方式对结果进行调整,以达到预期的展开结果。研究鞋面的初始展开与优化算法,将展开的鞋面进行织物组织的设计与仿真,最后将鞋面仿真结果映射到三维模型,对于鞋面产品的开发具有一定的实际意义。1初始化展开算法研究为了进行展开算法的研究,将三维鞋面模型进行三角网格化,如图1所示。图1三角网格化后的鞋面1.1中心三角形的选择将起始展开的三角形定义为整个鞋面的中心三角形。选择的中心三角形应尽可能使展开轮数最少,所以将鞋面起伏较为平缓的区域作为目标搜索区域,给出了中心三角形的搜索方法。首先将整个鞋面垂直映射到二维平面,搜索鞋面上所有点中x坐标的最小值xmin所在的点PA与最大值xmax所在的点PB,计算出它们的平均值xmid,接着选取穿过直线x=xmid的外边界边与内边界边,分别求取直线x=xmid与这些边的交点坐标,会得到图2中的四个交点。根据鞋面模型的坐标轴示意,将4个交点的y轴坐标从大到小进行排序,取排序结果中的前两个值所经编提花鞋面的展开算法及应...