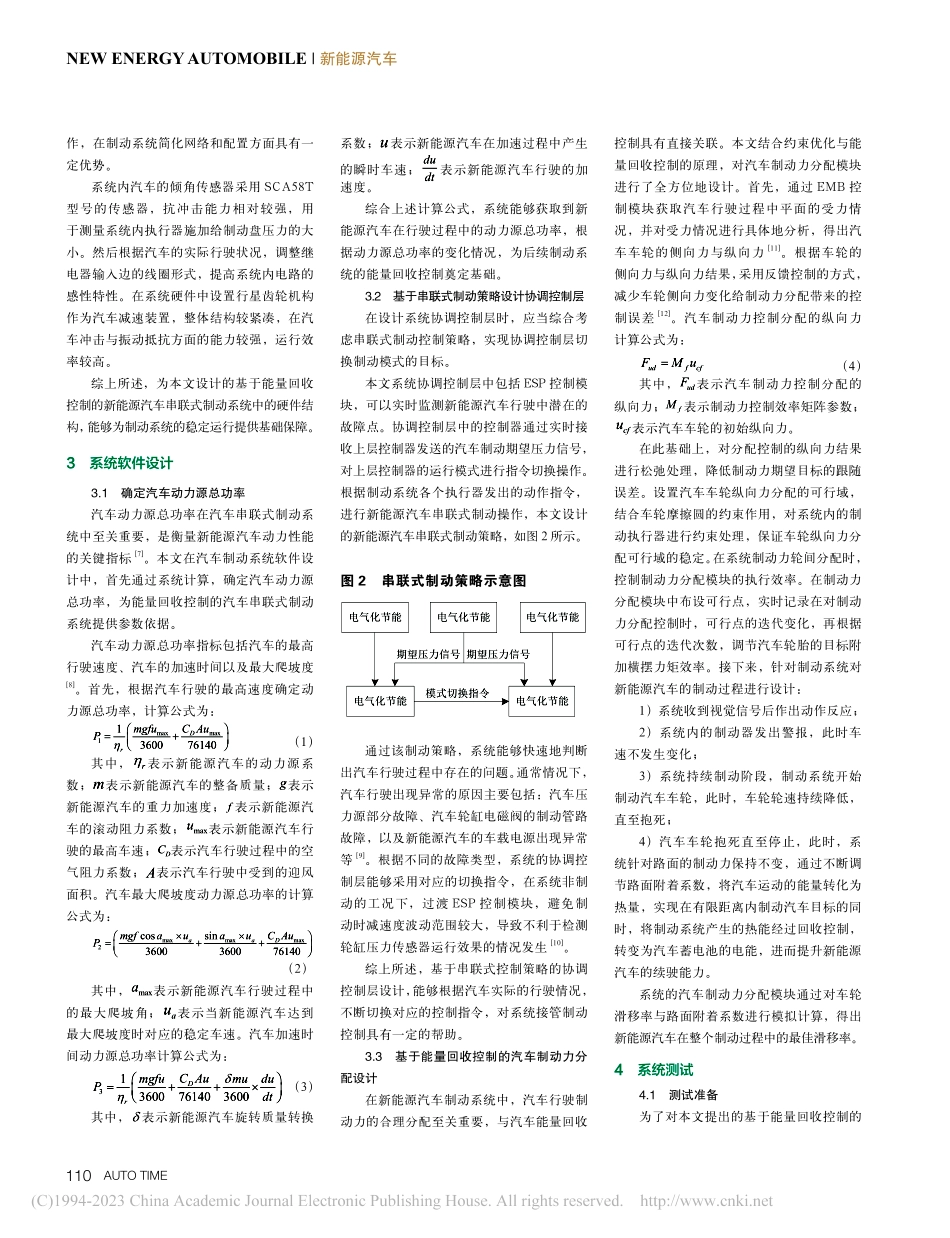
AUTOTIME109NEWENERGYAUTOMOBILE|新能源汽车考虑能量回收控制的新能源汽车串联式制动系统李奎闫丽君杨洪振黄河交通学院,汽车工程学院河南省焦作市454950摘要:由于当前汽车制动系统存在制动效果不佳、运行质量较差、无法将汽车的运动能量转化为热量等问题,使汽车续驶能力受到制约。为解决此类问题,引入能量回收控制原理,设计了一种新能源汽车串联式制动系统。制动系统采用了C/S硬件架构,在软件部分,通过确定汽车动力源总功率、结合串联式制动策略设计协调控制层,再基于能量回收控制设计汽车制动力分配模块。通过测试可知:在不同行驶工况下,本文系统车速制动优势明显,能够在短时间内实现快速制动车速的目标,进而提升了汽车的续航能力。关键词:能量回收控制新能源汽车串联式制动系统1引言制动系统作为汽车行驶中必不可少的部分,对汽车的行驶安全与稳定具有重要意义。汽车制动系统能够根据汽车的实际行驶情况,及时作出对应的响应,帮助汽车行驶更加稳定[1]。汽车制动系统具有多样化特点,根据功能、能量传输方式不同,其种类与形式也不同[2]。汽车制动系统对于汽车行驶驱动机构的可靠性具有一定保障[3]。汽车制动系统在运行过程中,通常情况下,车辆的运动能量会发生一定的变化,运动能量会逐渐转化为热量,通过释放作用释放到大气中[4]。随着能量回收技术的不断发展,如何将制动系统产生的热能经过回收控制,转变为汽车蓄电池的电能,进而提升车辆的续驶能力,是我国新能源汽车研究的重点问题。朱波[5]等人建立并联式制动能量回收系统模型,引入制动踏板开度修正系数,提出了一种制动能量回收转矩的控制方法。该方法有效提高了能量回收效率,但也因此制约了汽车的续航能力的提升。本研究在传统汽车制动系统的基础上,提出了新能源汽车串联式制动系统的研究,引入能量回收控制技术,对系统的硬件与软件进行优化设计,在保证新能源汽车行驶平稳性的同时,实现能量回收控制,提高新能源汽车的续驶能力与续驶里程。2系统硬件设计本文设计的基于能量回收控制的新能源汽车串联式制动系统采用C/S硬件架构,具有良好的性能,能够为制动系统内各个硬件的运行提供保障。制动系统采用ECU控制器,作为系统的核心硬件,在车载网络的连接下,能够控制汽车运行的车载[6]。ECU控制器的运行示意图,如图1所示。图1ECU控制器运行示意图本文选用了ECU控制器的运行结构。系统的微处理器采用DSP嵌入式数字信号处理器,内部集成数据存储器、计数器与A/D转换器...