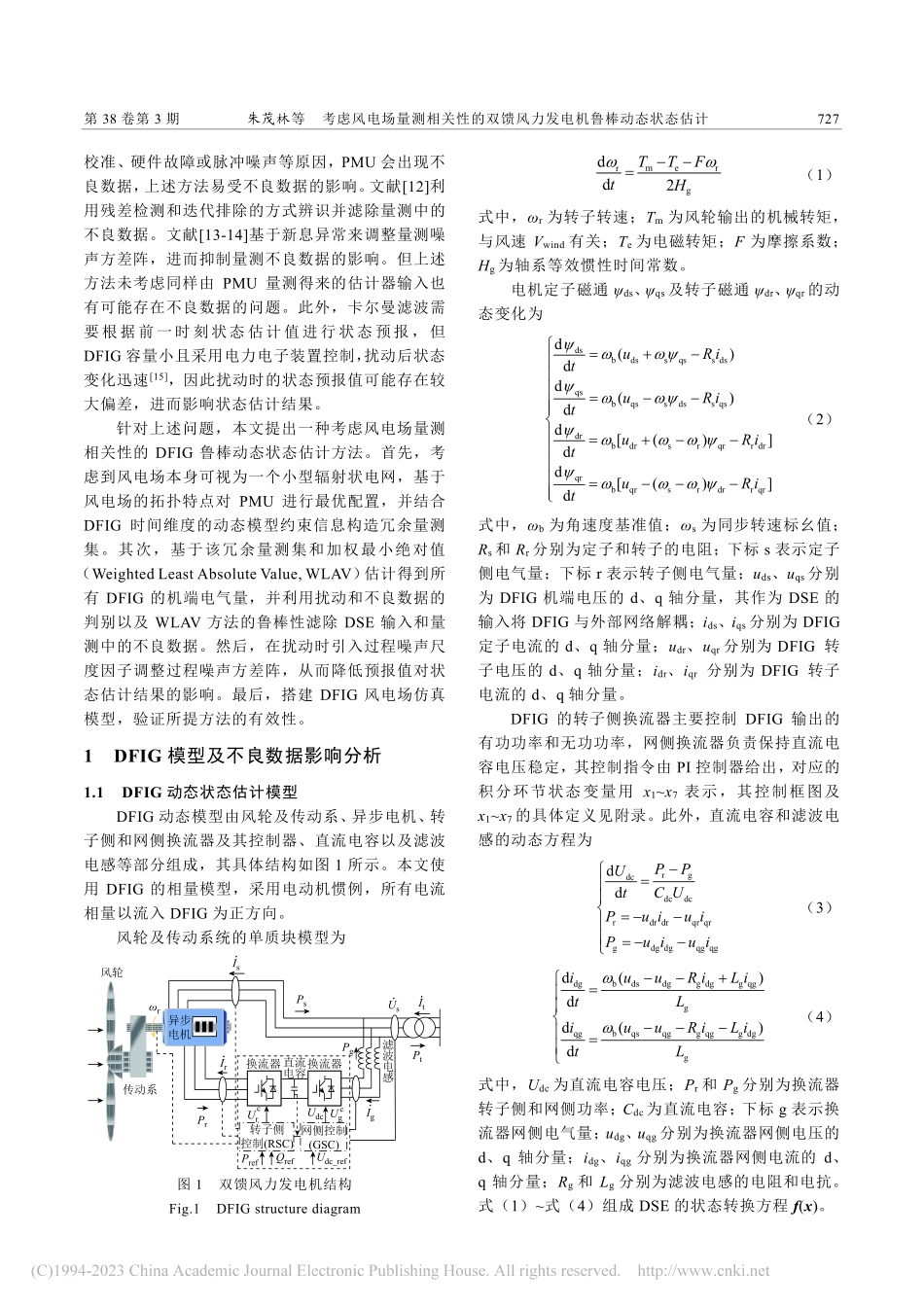
2023年2月电工技术学报Vol.38No.3第38卷第3期TRANSACTIONSOFCHINAELECTROTECHNICALSOCIETYFeb.2023DOI:10.19595/j.cnki.1000-6753.tces.221468考虑风电场量测相关性的双馈风力发电机鲁棒动态状态估计朱茂林刘灏毕天姝(新能源电力系统国家重点实验室(华北电力大学)北京102206)摘要基于相量测量单元(PMU)的风力发电机动态状态估计能够为风电场能量管理系统提供实时可靠的数据基础。然而,目前多数风电场不具备为每台风机都安装PMU的量测条件,且动态状态估计易受不良数据及扰动的影响。针对上述问题,提出一种考虑风电场量测相关性的双馈风机鲁棒动态状态估计方法。在用最少数量的PMU实现风电场所有节点可观的基础上,提出基于PMU量测空间相关性和风机动态模型时间相关性的冗余量测集构造方法,进而利用加权最小绝对值鲁棒估计得到所有风机的机端电气量,并滤除不良数据。考虑到扰动时状态预报值不准确,提出了基于过程噪声尺度因子的鲁棒滤波方法,在扰动时降低不准确预报值的权重。仿真表明,所提方法对量测配置要求低,并能准确估计风电场内单台风机的动态状态。关键词:双馈风机动态状态估计量测相关性最小绝对值估计鲁棒容积卡尔曼滤波中图分类号:TM6140引言在落实“碳达峰、碳中和”目标的大背景下,风电的开发利用必然会更加受到重视。然而风电具有强间歇性、随机波动性和低可调度性的特点[1],风电场侧能量管理系统(EnergyManagementSystem,EMS)可抑制风电波动对电网的影响,提高风电利用率[2]。相量测量单元(PhasorMeasurementUnit,PMU)能够实现快速同步量测,使动态状态估计(DynamicStateEstimation,DSE)成为可能[3]。DSE能在量测系统主站提高量测数据质量,并通过卡尔曼滤波的预报-滤波框架实时估计风机等动态元件的运行状态,进而用于风电场优化控制等EMS高级应用[4],对风电场全状态感知具有重要意义。双馈式风力发电机组(Doubly-FedInductionGenerator,DFIG)因其良好的经济性和运行特性成为风电场主力机型之一,本文选择其作为风电场DSE的研究对象。目前DFIG动态状态估计的相关文献[5-7]大多使用风电场等值模型,然后利用风电场并网点处的同步相量量测对该等效模型进行DSE。文献[5]假设DFIG等值模型的换流器输出电压可量测并作为DSE的输入,这对于等效模型难以实现。文献[6-7]用包括换流器控制系统在内的DFIG详细模型作为风电场等效模型,然而该等效模型控制器参数的准确获取是一个棘手问题。随着新能源占比的提高及测...