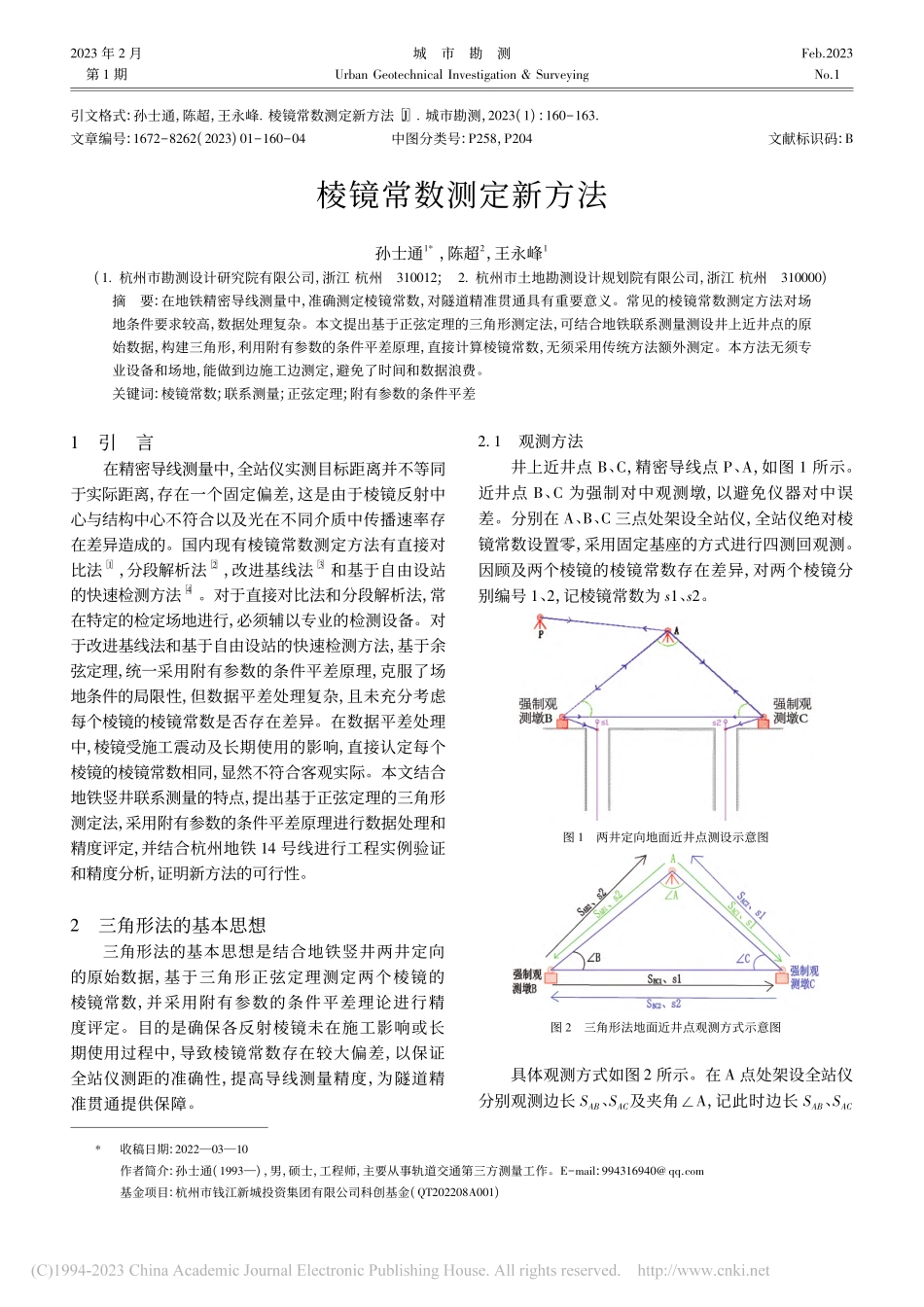
2023年2月第1期城市勘测UrbanGeotechnicalInvestigation&SurveyingFeb.2023No.1引文格式:孙士通,陈超,王永峰.棱镜常数测定新方法[J].城市勘测,2023(1):160-163.文章编号:1672-8262(2023)01-160-04中图分类号:P258,P204文献标识码:B棱镜常数测定新方法孙士通1*,陈超2,王永峰1*收稿日期:2022—03—10作者简介:孙士通(1993—),男,硕士,工程师,主要从事轨道交通第三方测量工作。E-mail:994316940@qq.com基金项目:杭州市钱江新城投资集团有限公司科创基金(QT202208A001)(1.杭州市勘测设计研究院有限公司,浙江杭州310012;2.杭州市土地勘测设计规划院有限公司,浙江杭州310000)摘要:在地铁精密导线测量中,准确测定棱镜常数,对隧道精准贯通具有重要意义。常见的棱镜常数测定方法对场地条件要求较高,数据处理复杂。本文提出基于正弦定理的三角形测定法,可结合地铁联系测量测设井上近井点的原始数据,构建三角形,利用附有参数的条件平差原理,直接计算棱镜常数,无须采用传统方法额外测定。本方法无须专业设备和场地,能做到边施工边测定,避免了时间和数据浪费。关键词:棱镜常数;联系测量;正弦定理;附有参数的条件平差1引言在精密导线测量中,全站仪实测目标距离并不等同于实际距离,存在一个固定偏差,这是由于棱镜反射中心与结构中心不符合以及光在不同介质中传播速率存在差异造成的。国内现有棱镜常数测定方法有直接对比法[1],分段解析法[2],改进基线法[3]和基于自由设站的快速检测方法[4]。对于直接对比法和分段解析法,常在特定的检定场地进行,必须辅以专业的检测设备。对于改进基线法和基于自由设站的快速检测方法,基于余弦定理,统一采用附有参数的条件平差原理,克服了场地条件的局限性,但数据平差处理复杂,且未充分考虑每个棱镜的棱镜常数是否存在差异。在数据平差处理中,棱镜受施工震动及长期使用的影响,直接认定每个棱镜的棱镜常数相同,显然不符合客观实际。本文结合地铁竖井联系测量的特点,提出基于正弦定理的三角形测定法,采用附有参数的条件平差原理进行数据处理和精度评定,并结合杭州地铁14号线进行工程实例验证和精度分析,证明新方法的可行性。2三角形法的基本思想三角形法的基本思想是结合地铁竖井两井定向的原始数据,基于三角形正弦定理测定两个棱镜的棱镜常数,并采用附有参数的条件平差理论进行精度评定。目的是确保各反射棱镜未在施工影响或长期使用过程中,导致棱镜常数存在较大...