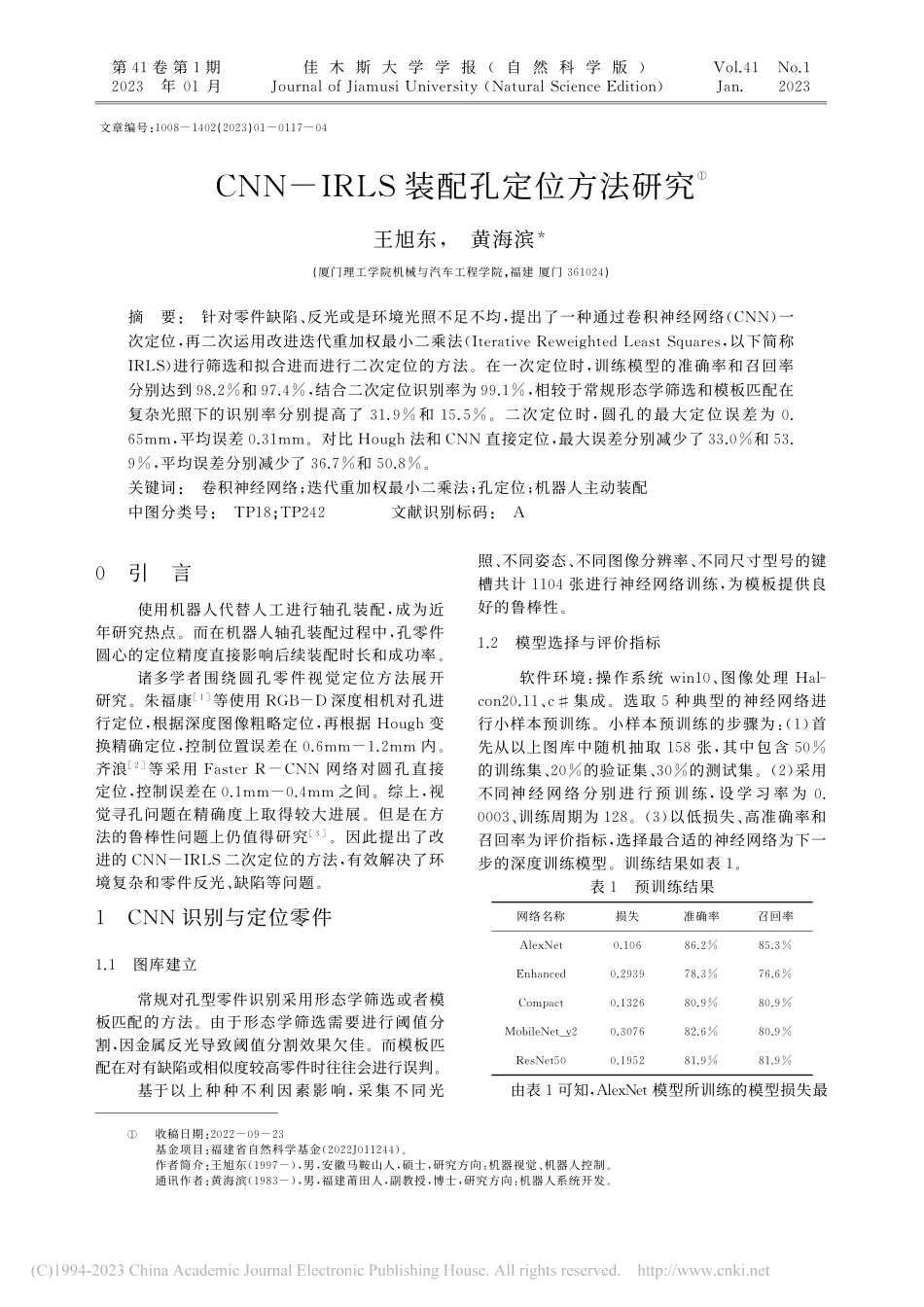
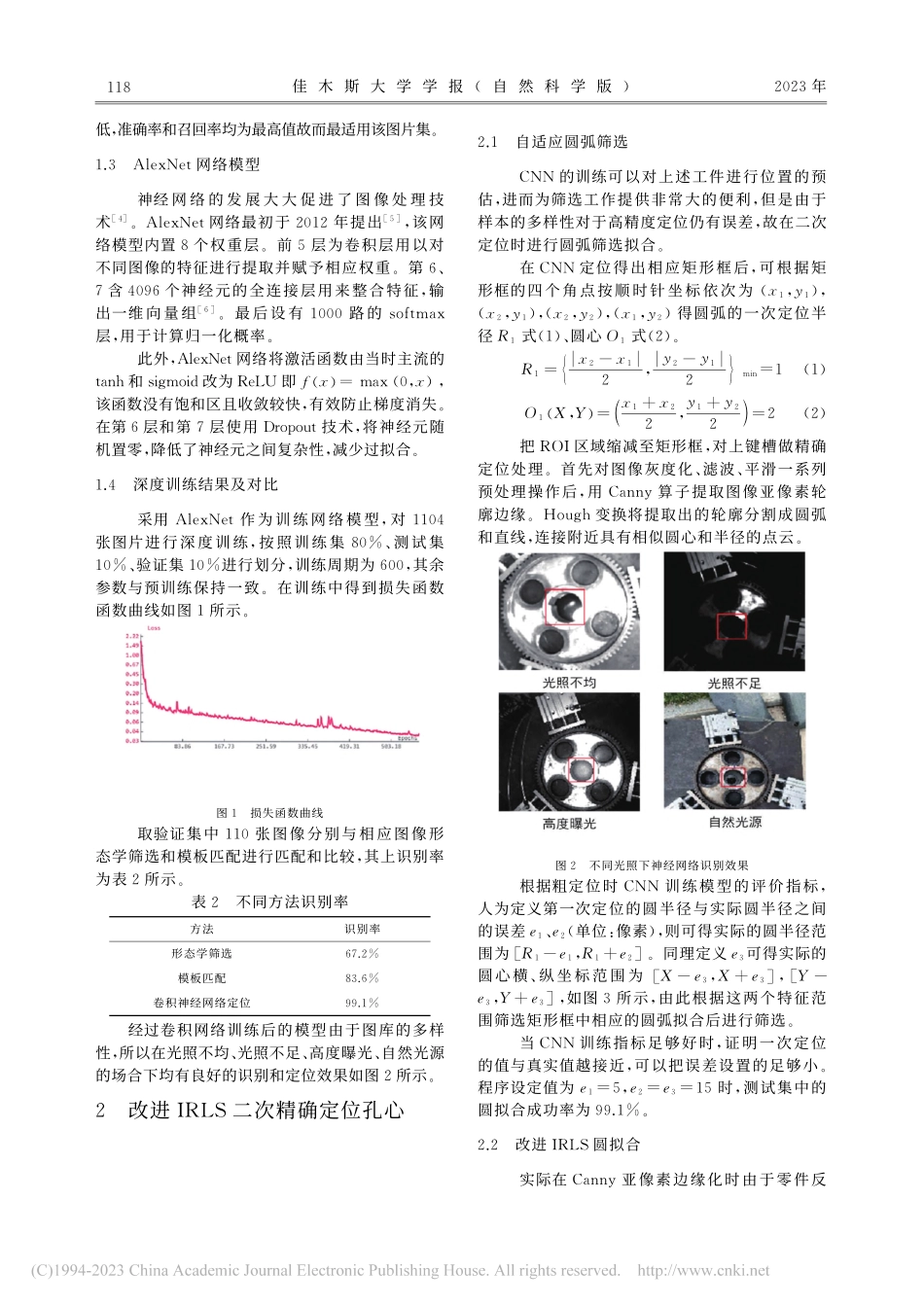
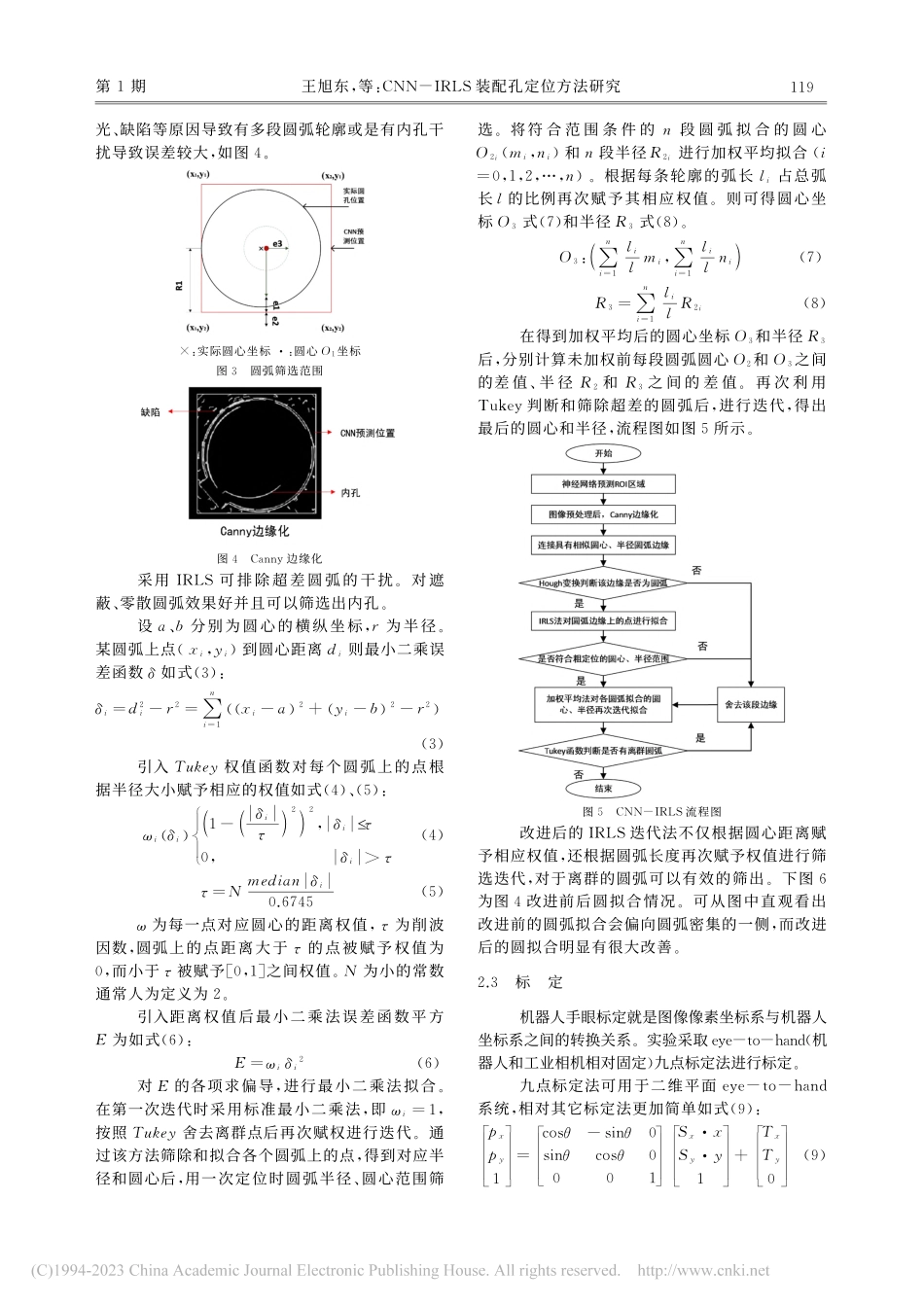
第41卷第1期佳木斯大学学报(自然科学版)Vol.41No.12023年01月JournalofJiamusiUniversity(NaturalScienceEdition)Jan.2023文章编号:1008-1402(2023)01-0117-04CNN-IRLS装配孔定位方法研究①王旭东,黄海滨*(厦门理工学院机械与汽车工程学院,福建厦门361024)摘要:针对零件缺陷、反光或是环境光照不足不均,提出了一种通过卷积神经网络(CNN)一次定位,再二次运用改进迭代重加权最小二乘法(IterativeReweightedLeastSquares,以下简称IRLS)进行筛选和拟合进而进行二次定位的方法。在一次定位时,训练模型的准确率和召回率分别达到98.2%和97.4%,结合二次定位识别率为99.1%,相较于常规形态学筛选和模板匹配在复杂光照下的识别率分别提高了31.9%和15.5%。二次定位时,圆孔的最大定位误差为0.65mm,平均误差0.31mm。对比Hough法和CNN直接定位,最大误差分别减少了33.0%和53.9%,平均误差分别减少了36.7%和50.8%。关键词:卷积神经网络;迭代重加权最小二乘法;孔定位;机器人主动装配中图分类号:TP18;TP242文献识别标码:A0引言使用机器人代替人工进行轴孔装配,成为近年研究热点。而在机器人轴孔装配过程中,孔零件圆心的定位精度直接影响后续装配时长和成功率。诸多学者围绕圆孔零件视觉定位方法展开研究。朱福康[1]等使用RGB-D深度相机对孔进行定位,根据深度图像粗略定位,再根据Hough变换精确定位,控制位置误差在0.6mm-1.2mm内。齐浪[2]等采用FasterR-CNN网络对圆孔直接定位,控制误差在0.1mm-0.4mm之间。综上,视觉寻孔问题在精确度上取得较大进展。但是在方法的鲁棒性问题上仍值得研究[3]。因此提出了改进的CNN-IRLS二次定位的方法,有效解决了环境复杂和零件反光、缺陷等问题。1CNN识别与定位零件1.1图库建立常规对孔型零件识别采用形态学筛选或者模板匹配的方法。由于形态学筛选需要进行阈值分割,因金属反光导致阈值分割效果欠佳。而模板匹配在对有缺陷或相似度较高零件时往往会进行误判。基于以上种种不利因素影响,采集不同光照、不同姿态、不同图像分辨率、不同尺寸型号的键槽共计1104张进行神经网络...