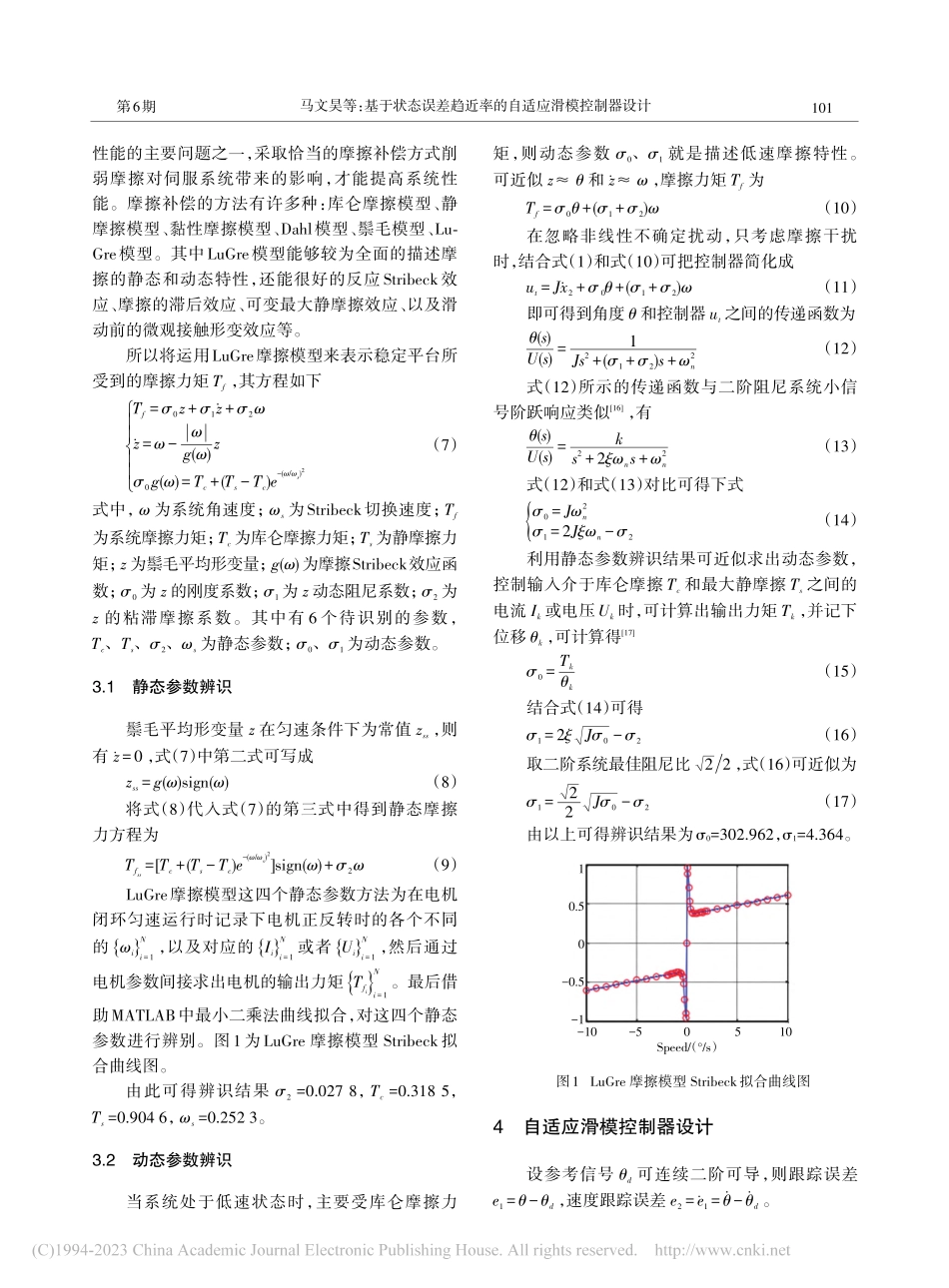
收稿日期:2021-06-08第37卷第6期2022年12月光电技术应用ELECTRO-OPTICTECHNOLOGYAPPLICATIONVol.37,No.6December,2022“光电吊舱”是由光机结构、伺服控制、图像处理等模块组合而成。因其可以将不确定性的扰动有效的隔离,并能够保持视场惯性空间的相对稳定,被广泛的应用在地理测绘、电子侦察、电力巡检等领域[1-2]。由于受到机载扰动和外界其他非线性不确定扰动力矩、转动力矩和不平衡力矩,导致搭建精确的系统数学模型是不符合实际的,这对系统伺服控制的设计是一个巨大的挑战。滑模控制[3]是一种简单且控制性能优越的控制方法,具有可设计滑动模态、少量的参数调节、较快·电路与控制·基于状态误差趋近率的自适应滑模控制器设计马文昊1,安化海2,高学鹏2(1.辽宁工业大学,辽宁锦州;2.中国电子科技集团公司光电研究院,天津)摘要:首先,针对光电稳定平台滑模控制中普通滑模趋近率对系统造成的抖振、收敛较慢的问题以及对于系统转动惯量摄动的抑制问题,提出了一种在指数趋近率基础上引入系统状态和跟踪误差的状态误差趋近率,系统状态点在滑动过程中使误差减小,从而控制增益逐渐减小,误差满足允许误差范围内时稳定在原点附近,减小了抖动,加快了收敛速度。其次,又针对光电稳定平台跟踪时框架系统的低速性造成不可避免的转矩扰动,提出了一种基于LurGre摩擦模型的自适应滑模控制方法,建立了包含该摩擦模型的机电伺服控制模型。最后,利用李雅普诺夫函数验证了控制器的稳定性,通过Matlab仿真加以证明该控制器比传统的控制方法具有较强的鲁棒性和较好的跟踪精度及抗干扰能力。关键词:光电稳定平台;状态误差趋近率;滑模控制器;LuGre摩擦模型;自适应控制中图分类号:TN710.6文献标识码:A文章编号:1673-1255(2022)-06-0099-08DesignofAdaptiveSlidingModeControllerBasedonStateErrorApproachRateMAWenhao1,ANHuahai2,GAOXuepeng2(1.LiaoningUniversityofTechnology,Jinzhou,China;2.AcademyofOpto-Electronic,ChinaElectronicTechnologyGroupCorporation(AOECETC),Tianjin,China)Abstract:Firstly,aimingatthechatteringandslowconvergencecausedbythecommonslidingmodeap⁃proachrateintheslidingmodecontrolofthephotoelectricstabilizedplatformandthesuppressionoftheperturba⁃tionofthesystemmomentofinertia,astateerrorapproachratebasedontheexponentialapproachrateisproposed,whichintroducesthesystemstateandtr...