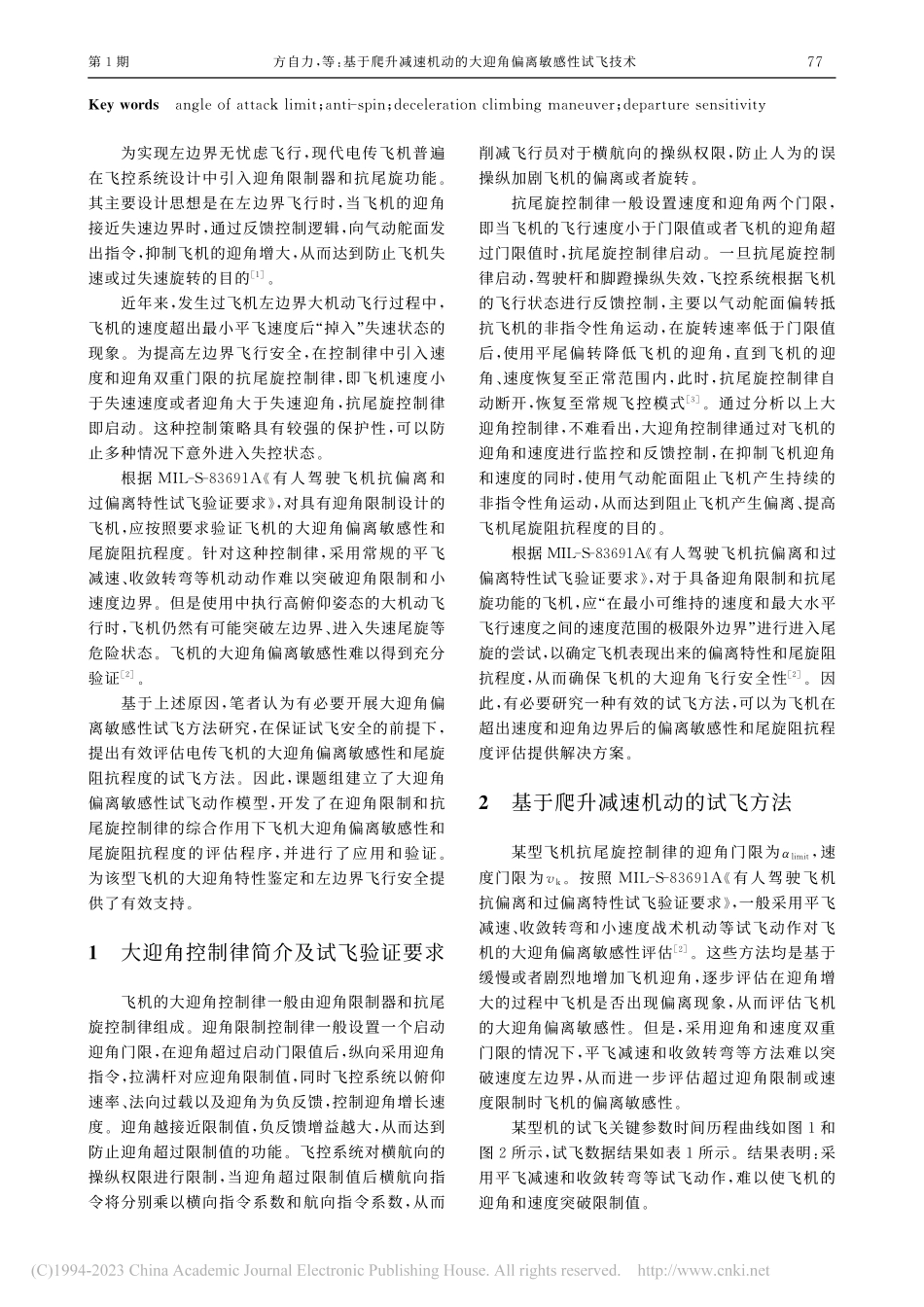
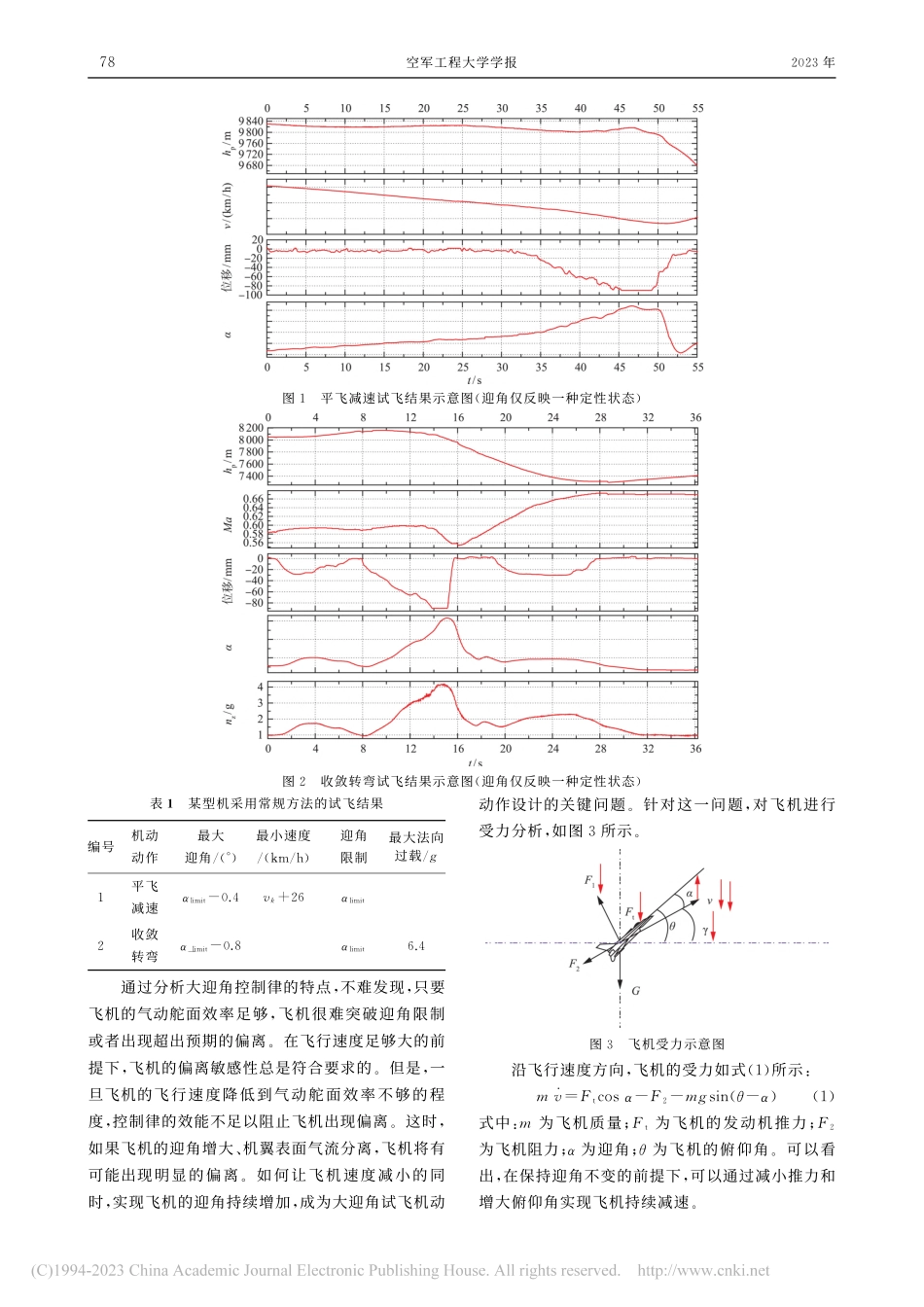
第24卷第1期空军工程大学学报Vol.24No.12023年2月JOURNALOFAIRFORCEENGINEERINGUNIVERSITYFeb.2023收稿日期:2022-09-13作者简介:方自力(1987-),男,湖北随州人,高级工程师,研究方向为飞机飞行试验技术。E-mail:fangzilicom@sina.com引用格式:方自力,何太,李吉宽,等.基于爬升减速机动的大迎角偏离敏感性试飞技术[J].空军工程大学学报,2023,24(1):76-81.FANGZili,HETai,LIJikuan,etal.AFlightTestMethodforDepartureSensitivityatHighAngleofAttackBasedonDeceleratedClimbingManeu-ver[J].JournalofAirForceEngineeringUniversity,2023,24(1):76-81.基于爬升减速机动的大迎角偏离敏感性试飞技术方自力1,何太1,李吉宽2,樊力1(1.中国飞行试验研究院,西安,710089;2.空军试飞员学校,西安,710089)摘要为防止飞机意外进入大迎角失速尾旋状态,现代电传飞机通常采用左边界保护控制策略。但在使用中,仍然难以避免由于飞行速度超出左边界后“掉入”大迎角状态的现象。为全面评估飞机的左边界飞行安全,必须通过试飞验证飞机大迎角偏离敏感性。采用传统的平飞失速和收敛转弯等试飞方法,难以解决飞机超出左边界后“掉入”大迎角状态后的偏离敏感性评估问题。针对某型飞机迎角限制和抗尾旋控制律的特点,提出了基于爬升减速机动的大迎角偏离敏感性评估方法,采用飞行仿真技术开发了大迎角偏离敏感性试飞动作,建立了在迎角限制和抗尾旋控制律的综合作用下飞机大迎角偏离敏感性和尾旋阻抗程度的评估程序,并且在某型飞机上进行了应用和验证,全面评估了某型飞机的大迎角偏离敏感性和尾旋阻抗程度,为该型机的左边界飞行安全提供了有效的支持。关键词迎角限制;抗尾旋;爬升减速机动;偏离敏感性DOI10.3969/j.issn.2097-1915.2023.01.011中图分类号V217.32文献标志码A文章编号2097-1915(2023)01-0076-06AFlightTestMethodforDepartureSensitivityatHighA...