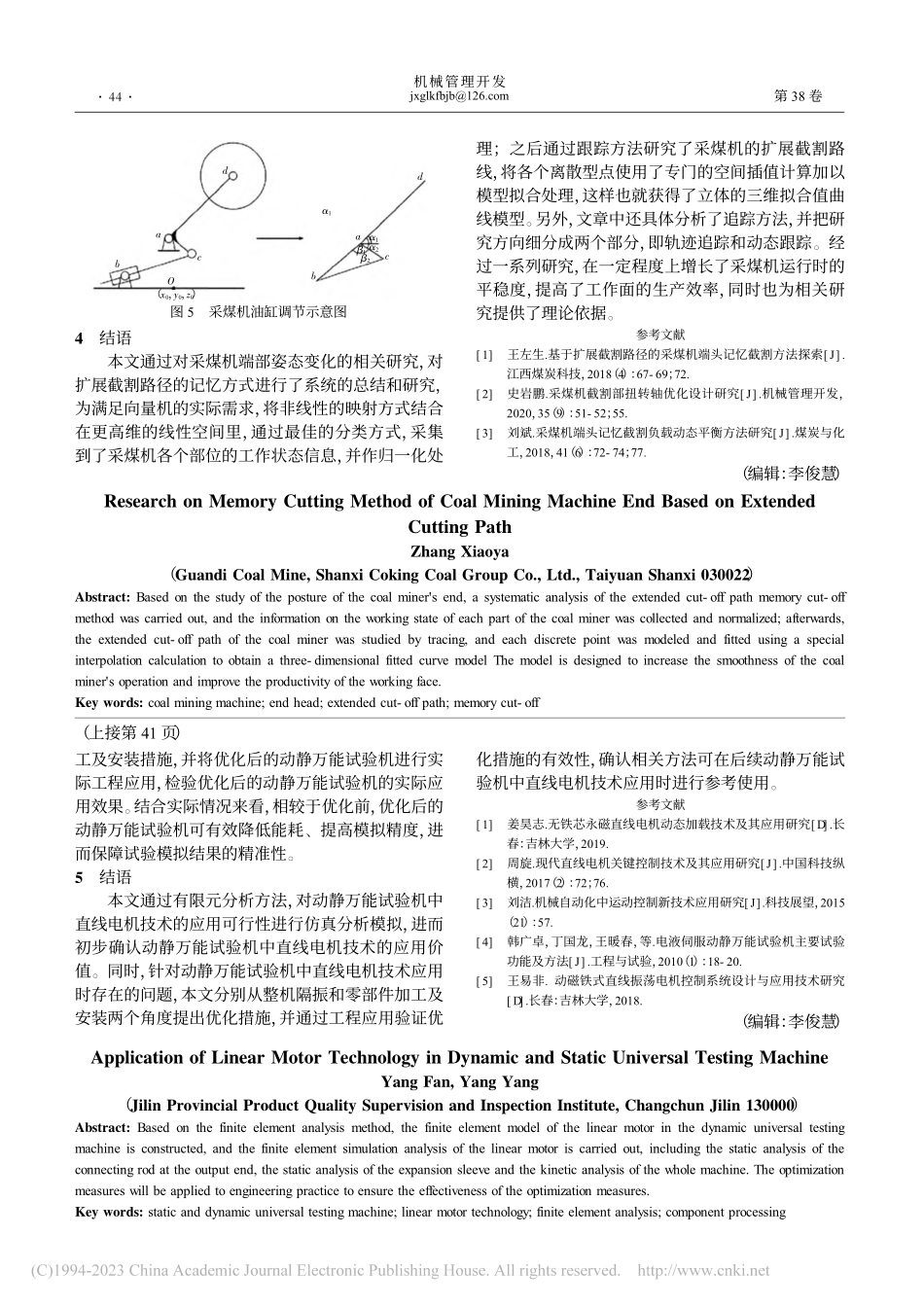
基于扩展截割路径的采煤机端头记忆截割方法研究张骁亚(山西焦煤集团有限责任公司官地煤矿,山西太原030022)摘要:在研究采煤机端头姿势形态的基础上,对扩展截割路径记忆截割方式进行了系统性分析,并收集到采煤机各个部位的工作状态信息,作了归一化处理;之后通过追踪研究了采煤机的扩展截割路线,将各个离散型点使用特殊的插值计算加以模型化拟合处理,获得了立体的三维拟合值曲线模型,以期增长采煤机运行时的平稳度,提高工作面的生产效率。关键词:采煤机端头扩展截割路径记忆截割中图分类号:TD421.6文献标识码:A文章编号:1003-773X(2023)02-0042-03引言相比于20世纪,近些年国内的煤炭生产在安全性与可靠性方面都取得了显著的提升,然而放眼世界,我国与世界上的发达国家相比,井下的安全事故仍旧要高出一截,究其原因,根本因素是国内的煤层赋存条件相对恶劣,技术因素是我国相比于发达国家在井下的智能化方面仍然存在一定的差距。根据相关人员报道,我国地下工作面的生产事故发生率高达80%以上,每年矿山事故发生概率占全球矿山的1/2以上。因此,还需要在综采设备的自动化、智能化方面下很大的功夫,力求达到井下“少人化”甚至“无人化”开采,也许在未来的某一天,我国可以在采煤机自动截煤、液压支架自动跟踪支撑、刮板输送机自动运输等关键技术上取得突破。本文将山西某矿的综采工作面作为研究背景,该工作面的端头工作情况恶劣,煤岩体分层处不稳定,因此就造成了采煤机在工作时,由于负载不稳定,从而使得其在运输时达不到平稳状态;本文分析了扩展截割路径中各个记忆点的特点,然后建立了包括记忆点与常规点在内的记忆点集合,最后具体研究扩展截割路径的跟踪目标[1]。1基于截割路径的采煤机端头姿态研究采煤机端部姿态的研究是本文的基础。在研究采煤机端部姿态时,应该假设采煤机所服务的工作面底板大致平坦,也就是说随着工作面的推进,端头处的倾角大小基本不变。在采煤机运行途中,它是通过与刮板输送机的啮合来实现的,可以将刮板输送机与采煤机之间的啮合点作为一个特殊点来研究,从而得到具体的采煤机右侧端头位置的定位图,如图1所示。观察图1,可以将x轴的方向作为刮板材料输送的运动方向,其中以x轴的运动方向作为其前进的方向;但是,由于y轴的方向指向了正好垂直于作业面的岩层底板面积,其正向运动方向所指的位置也正是采空区面积;最后的z轴指向,它的正向方向恰好指示的是煤层壁。如图2所示为采煤机右端截...