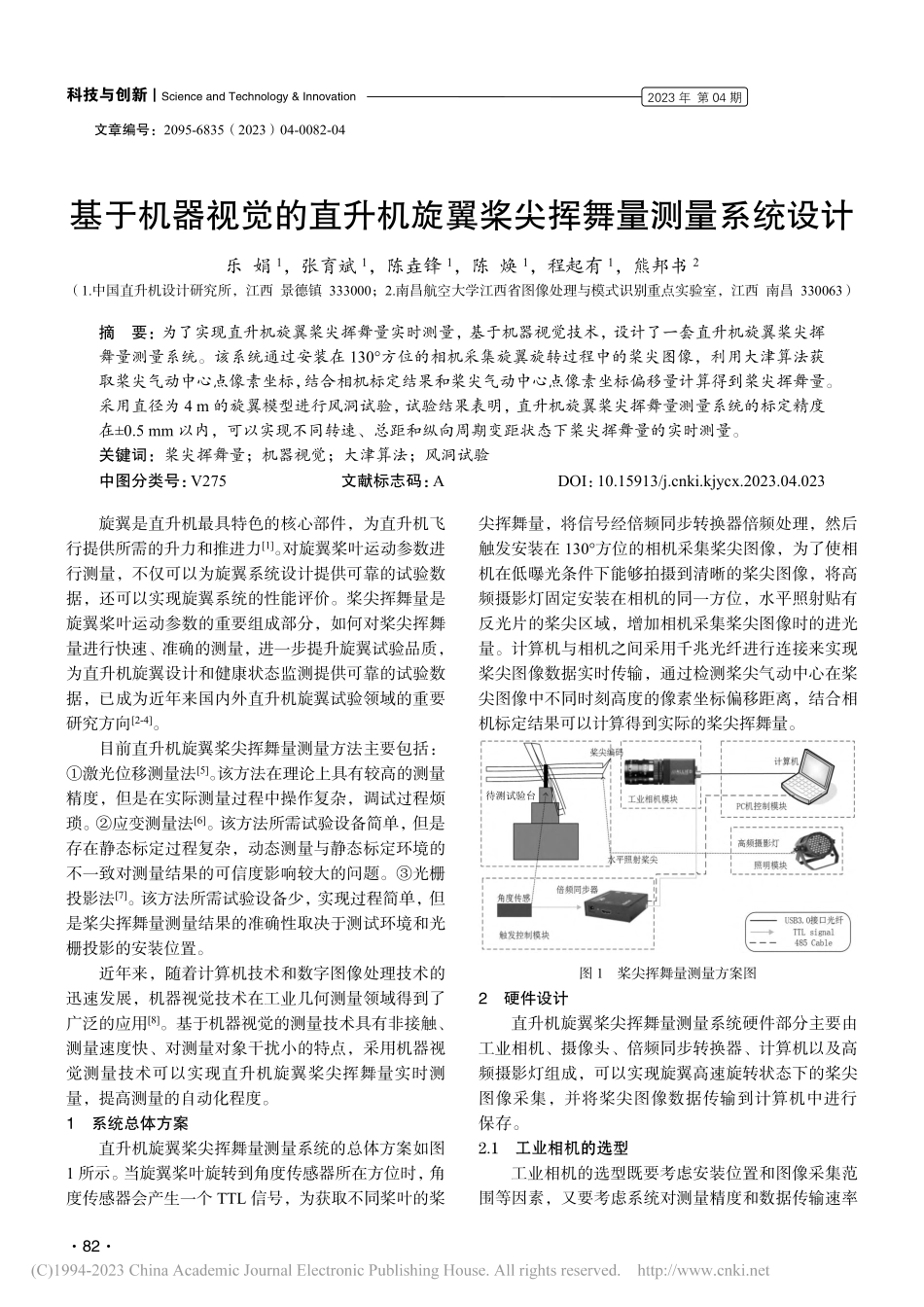
科技与创新┃ScienceandTechnology&Innovation·82·2023年第04期文章编号:2095-6835(2023)04-0082-04基于机器视觉的直升机旋翼桨尖挥舞量测量系统设计乐娟1,张育斌1,陈垚锋1,陈焕1,程起有1,熊邦书2(1.中国直升机设计研究所,江西景德镇333000;2.南昌航空大学江西省图像处理与模式识别重点实验室,江西南昌330063)摘要:为了实现直升机旋翼桨尖挥舞量实时测量,基于机器视觉技术,设计了一套直升机旋翼桨尖挥舞量测量系统。该系统通过安装在130°方位的相机采集旋翼旋转过程中的桨尖图像,利用大津算法获取桨尖气动中心点像素坐标,结合相机标定结果和桨尖气动中心点像素坐标偏移量计算得到桨尖挥舞量。采用直径为4m的旋翼模型进行风洞试验,试验结果表明,直升机旋翼桨尖挥舞量测量系统的标定精度在±0.5mm以内,可以实现不同转速、总距和纵向周期变距状态下桨尖挥舞量的实时测量。关键词:桨尖挥舞量;机器视觉;大津算法;风洞试验中图分类号:V275文献标志码:ADOI:10.15913/j.cnki.kjycx.2023.04.023旋翼是直升机最具特色的核心部件,为直升机飞行提供所需的升力和推进力[1]。对旋翼桨叶运动参数进行测量,不仅可以为旋翼系统设计提供可靠的试验数据,还可以实现旋翼系统的性能评价。桨尖挥舞量是旋翼桨叶运动参数的重要组成部分,如何对桨尖挥舞量进行快速、准确的测量,进一步提升旋翼试验品质,为直升机旋翼设计和健康状态监测提供可靠的试验数据,已成为近年来国内外直升机旋翼试验领域的重要研究方向[2-4]。目前直升机旋翼桨尖挥舞量测量方法主要包括:①激光位移测量法[5]。该方法在理论上具有较高的测量精度,但是在实际测量过程中操作复杂,调试过程烦琐。②应变测量法[6]。该方法所需试验设备简单,但是存在静态标定过程复杂,动态测量与静态标定环境的不一致对测量结果的可信度影响较大的问题。③光栅投影法[7]。该方法所需试验设备少,实现过程简单,但是桨尖挥舞量测量结果的准确性取决于测试环境和光栅投影的安装位置。近年来,随着计算机技术和数字图像处理技术的迅速发展,机器视觉技术在工业几何测量领域得到了广泛的应用[8]。基于机器视觉的测量技术具有非接触、测量速度快、对测量对象干扰小的特点,采用机器视觉测量技术可以实现直升机旋翼桨尖挥舞量实时测量,提高测量的自动化程度。1系统总体方案直升机旋翼桨尖挥舞量测量系统的总体方案如图1所示。当旋翼桨叶旋转到角度传感器所在方位时,角度传感器会产生...