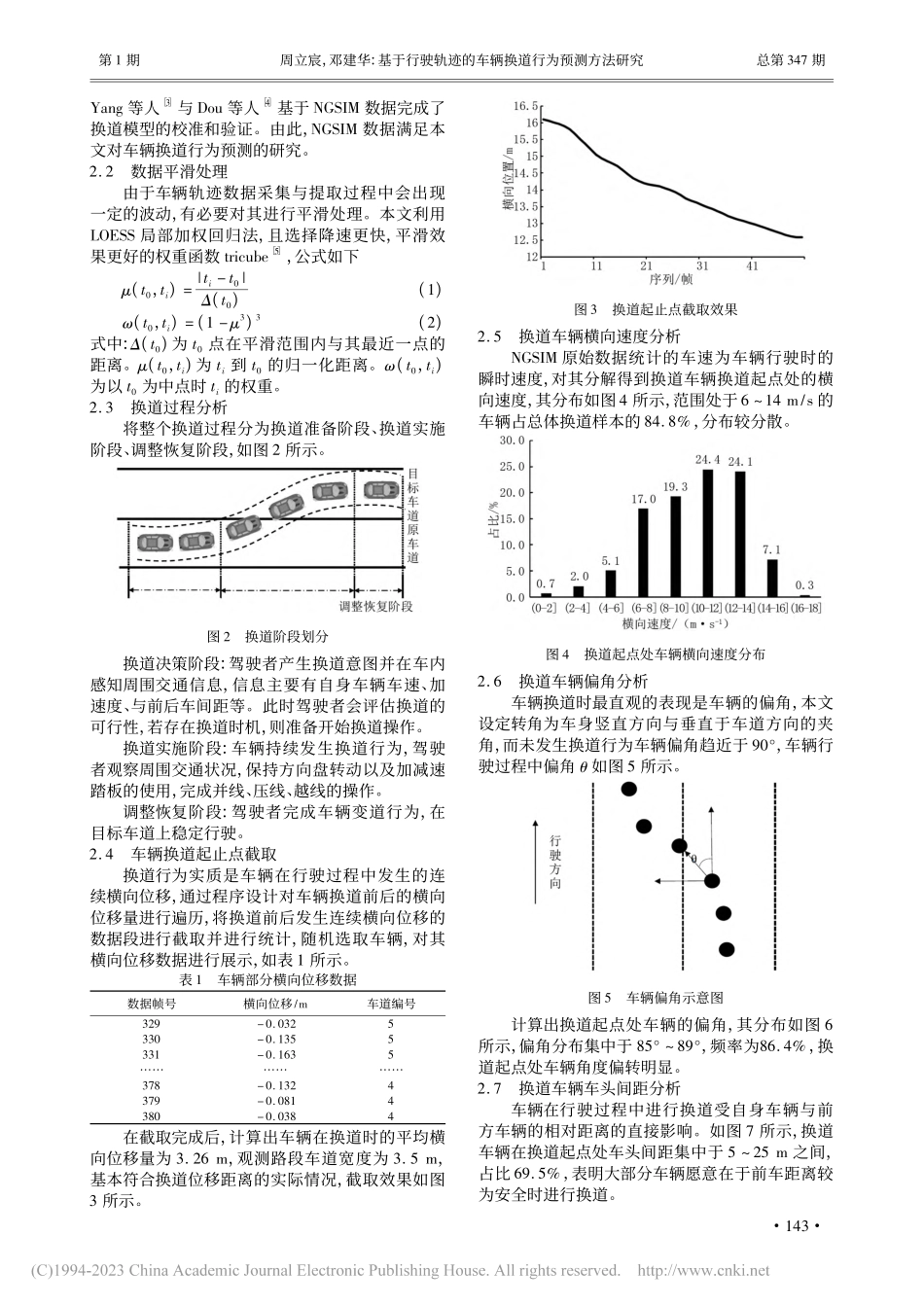
2023年第1期(总第347期)黑龙江交通科技HEILONGJIANGJIAOTONGKEJINo.1,2023(SumNo.347)基于行驶轨迹的车辆换道行为预测方法研究周立宸,邓建华(苏州科技大学土木工程学院,江苏苏州215011)摘要:车辆换道行为是机动车在道路上行驶时的一种常见行为,对其进行预测能有效减少交通事故。基于NGSIM项目数据,对换道车辆换道时刻的行为特性进行分析,运用随机森林算法筛选出表征换道行为的参数指标:横纵向速度、加速度、偏角、车头间距以及相对时距,提出一种级联LSTM模型预测车辆在行驶过程中是否会发生换道行为,并与传统单层LSTM模型对比。结果表明:级联LSTM模型预测准确率可达93.6%,具有良好的换道预测效果且高于单层LSTM模型,可为自动驾驶和深度学习提供一定的理论参考。关键词:行为特性;随机森林;神经网络;换道预测中图分类号:U492文献标识码:A文章编号:1008-3383(2023)01-0142-03ResearchonthePredictionMethodofVehicleLaneChangingBehaviorBasedonDrivingTrajectoryZHOULi-chen,DENGJian-hua(CollegeofCivilEngineering,SuzhouUniversityofScienceandTechnology,Suzhou,Jiangsu215011,China)Abstract:Vehiclelane-changingbehaviorisacommonbehaviorwhenmotorvehiclesaredrivingontheroad,andpredictingitcanef-fectivelyreducetrafficaccidents.BasedonthedataofNGSIMproject,thispaperanalyzesthebehaviorcharacteristicsoflane-chan-gingvehiclesatlane-changingtime,andusestherandomforestalgorithmtoscreenouttheparametersthatcharacterizelane-chan-gingbehavior,suchashorizontalandverticalspeed,acceleration,corner,headwayandrelativetimedistance.AcascadeLSTMmodelisproposedtopredictwhetherthevehicleswillchangelanesduringdriving,andcomparedwiththetraditionalsingle-layerLSTMmod-el.TheresultsshowthatthepredictionaccuracyofcascadeLSTMmodelcanreach93.6%,whichhasagoodlanechangepredictioneffectandishigherthanthatofsingle-layerLSTMmodel,andcanprovidesometheoreticalreferenceforautonomousdrivinganddeeplearning.Keywords:behaviorcharacteristics;randomforest;neuralnetwork;lanechangeprediction收稿日期:2022-05-10作者简介:周立宸(1996—),男,江苏常州人,硕士,研究方向:交通规划、交通仿真与控制1引言近年来,我国城镇化的进程加快,城镇人口数量随之急速增...