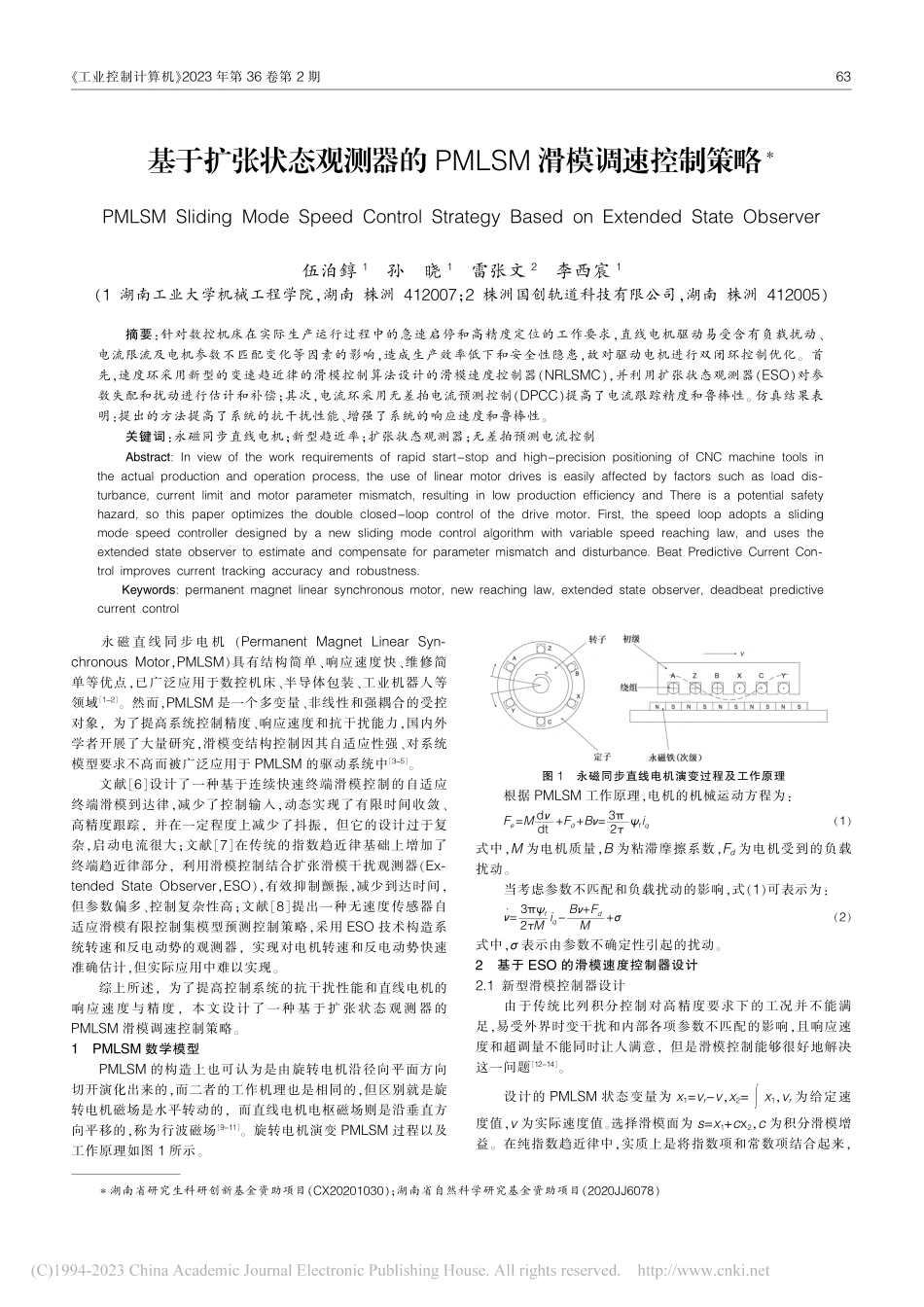
《工业控制计算机》2023年第36卷第2期伍泊錞1孙晓1雷张文2李西宸1(1湖南工业大学机械工程学院,湖南株洲412007;2株洲国创轨道科技有限公司,湖南株洲412005)PMLSMSlidingModeSpeedControlStrategyBasedonExtendedStateObserver摘要:针对数控机床在实际生产运行过程中的急速启停和高精度定位的工作要求,直线电机驱动易受含有负载扰动、电流限流及电机参数不匹配变化等因素的影响,造成生产效率低下和安全性隐患,故对驱动电机进行双闭环控制优化。首先,速度环采用新型的变速趋近律的滑模控制算法设计的滑模速度控制器(NRLSMC),并利用扩张状态观测器(ESO)对参数失配和扰动进行估计和补偿;其次,电流环采用无差拍电流预测控制(DPCC)提高了电流跟踪精度和鲁棒性。仿真结果表明:提出的方法提高了系统的抗干扰性能、增强了系统的响应速度和鲁棒性。关键词:永磁同步直线电机;新型趋近率;扩张状态观测器;无差拍预测电流控制Abstract:Inviewoftheworkrequirementsofrapidstart-stopandhigh-precisionpositioningofCNCmachinetoolsintheactualproductionandoperationprocess,theuseoflinearmotordrivesiseasilyaffectedbyfactorssuchasloaddis-turbance,currentlimitandmotorparametermismatch,resultinginlowproductionefficiencyandThereisapotentialsafetyhazard,sothispaperoptimizesthedoubleclosed-loopcontrolofthedrivemotor.First,thespeedloopadoptsaslidingmodespeedcontrollerdesignedbyanewslidingmodecontrolalgorithmwithvariablespeedreachinglaw,andusestheextendedstateobservertoestimateandcompensateforparametermismatchanddisturbance.BeatPredictiveCurrentCon-trolimprovescurrenttrackingaccuracyandrobustness.Keywords:permanentmagnetlinearsynchronousmotor,newreachinglaw,extendedstateobserver,deadbeatpredictivecurrentcontrol永磁直线同步电机(PermanentMagnetLinearSyn-chronousMotor,PMLSM)具有结构简单、响应速度快、维修简单等优点,已广泛应用于数控机床、半导体包装、工业机器人等领域[1-2]。然而,PMLSM是一个多变量、非线性和强耦合的受控对象,为了提高系统控制精度、响应速度和抗干扰能力,国内外学者开展了大量研究,滑模变结构控制因其自适应性强、对系统模型要求不高而被广泛应用于PMLSM的驱动系统中[3-5]。文献[6]设计了一种基于连续快速终端滑模控制的自适应终端滑模到达律...