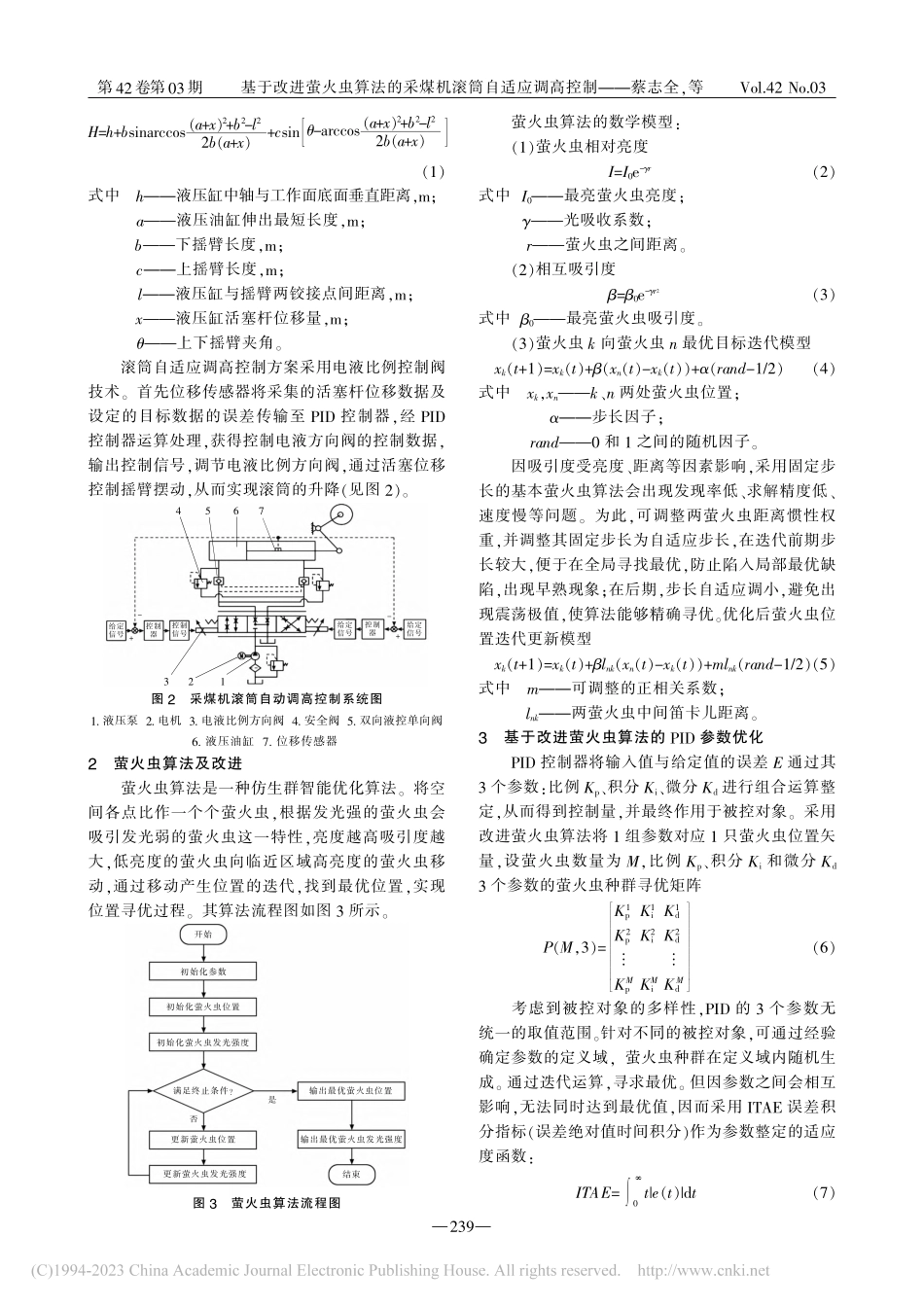
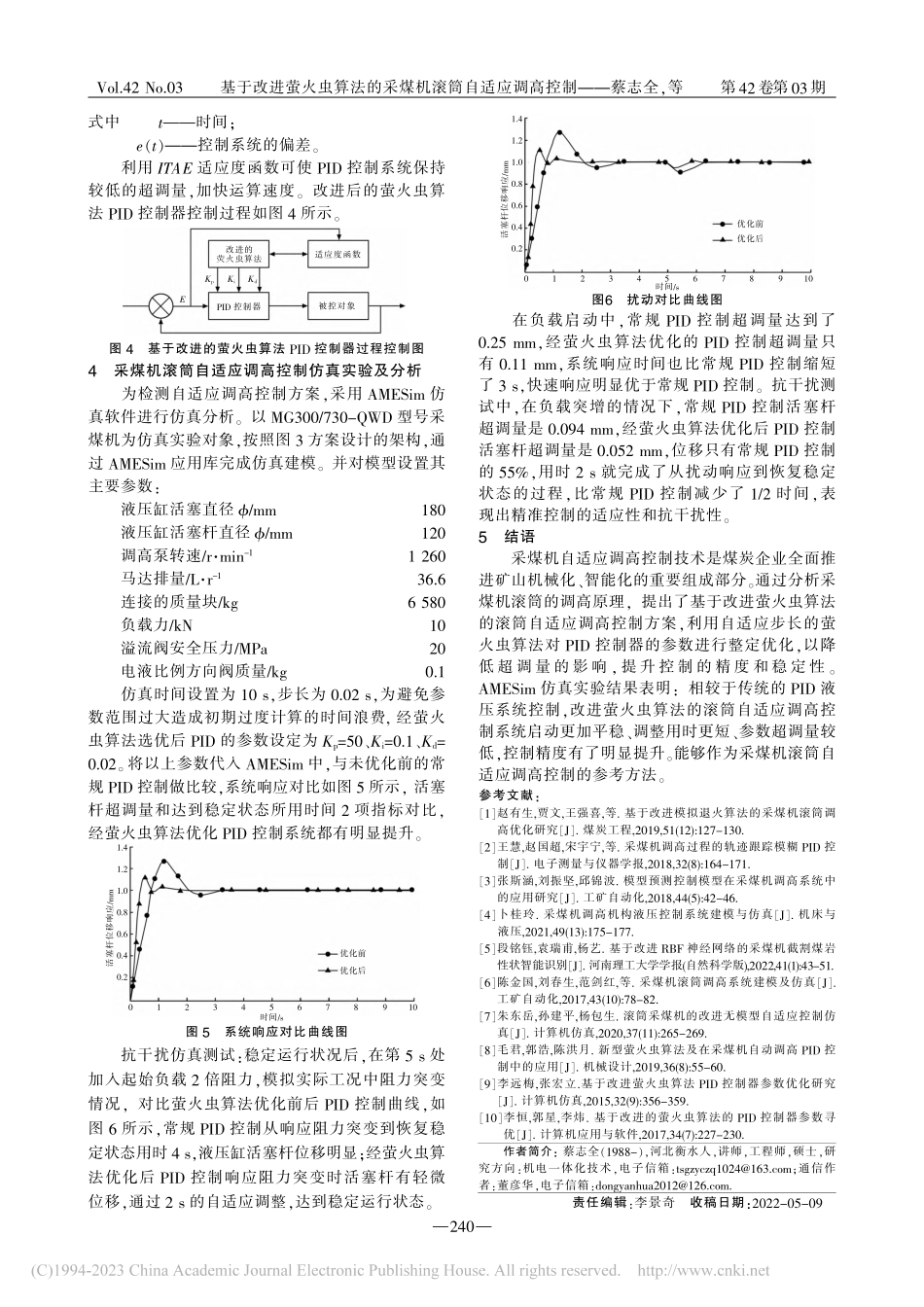
第42卷第03期2023年03月煤炭技术CoalTechnologyVol.42No.03Mar.2023doi:10.13301/j.cnki.ct.2023.03.0470前言采煤机滚筒截割部自动调高控制是实现综采自动化的关键环节。在截煤作业中,滚筒调高(升降)是通过控制液压缸伸缩实现的。传统的采煤机调高多以人工手动控制方式为主,由于作业面环境和人员素质等因素的影响,无法及时判断出截割状态,调高控制的实效性和准确性较差。不仅会造成设备损坏及采煤质量下降、效率低下等情况,还会引发严重的安全事故。为了实现综采面无人化管理和设备自动化、智能化,设计了采煤机滚筒自适应调高控制方案,采用萤火虫算法对PID控制器进行参数整定,并将萤火虫算法的固定步长改进为自适应步长,以解决算法收敛过程中的早熟以及震荡极值现象。通过仿真实验分析对比,控制系统响应速度、精度和抗干扰性都得到提升,验证了方案的合理性与可行性,能够进一步提升综采智能化水平。1采煤机滚筒调高原理及控制方案采煤机滚筒的调高由液压系统控制,通过调高液压缸活塞移动,带动摇臂位置变化,实现对滚筒高度的调整,其调高结构及工作原理如图1所示。图1液压缸活塞杆行程与滚筒高度工作原理图1.液压油缸2.上摇臂3.滚筒4.下摇臂5.工作面底面采煤机液压缸活塞杆行程与滚筒高度是非线性,且有明确的函数关系,采煤机滚筒轴心与工作面底面垂直距离*2020年唐山市应用基础研究计划项目(20130229b)基于改进萤火虫算法的采煤机滚筒自适应调高控制*蔡志全1,董彦华2(1.唐山工业职业技术学院,河北唐山063299;2.河北科技学院,河北唐山063509)摘要:针对传统采煤机滚筒调高方法实现过程复杂、控制精度较低、系统响应速度较慢等不足,提出了一种基于改进萤火虫算法的采煤机滚筒自适应调高控制方法。通过分析滚筒调高原理,将萤火虫算法固定步长调整为自适应步长,完成适应度函数的控制,从而对PID参数优化,实现滚筒的自适应调高。由AMESim仿真结果可知,基于改进萤火虫算法的采煤机滚筒自适应调高控制方法超调量较小、控制精度高、响应速度较快,满足实际控制要求,能够进一步提升矿企的智能化开采水平。关键词:萤火虫算法;采煤机滚筒;PID参数优化;自适应调高中图分类号:TD421;TP18文献标志码:A文章编号:1008-8725(2023)03-238-03AdaptiveHeightAdjustmentControlofShearerDrumBasedonImprovedFireflyAlgorithmCAIZhiquan1,DONGYanhua2(1.TangshanPolytechnicCollege,Tangshan063299,China;2.HebeiCollegeo...