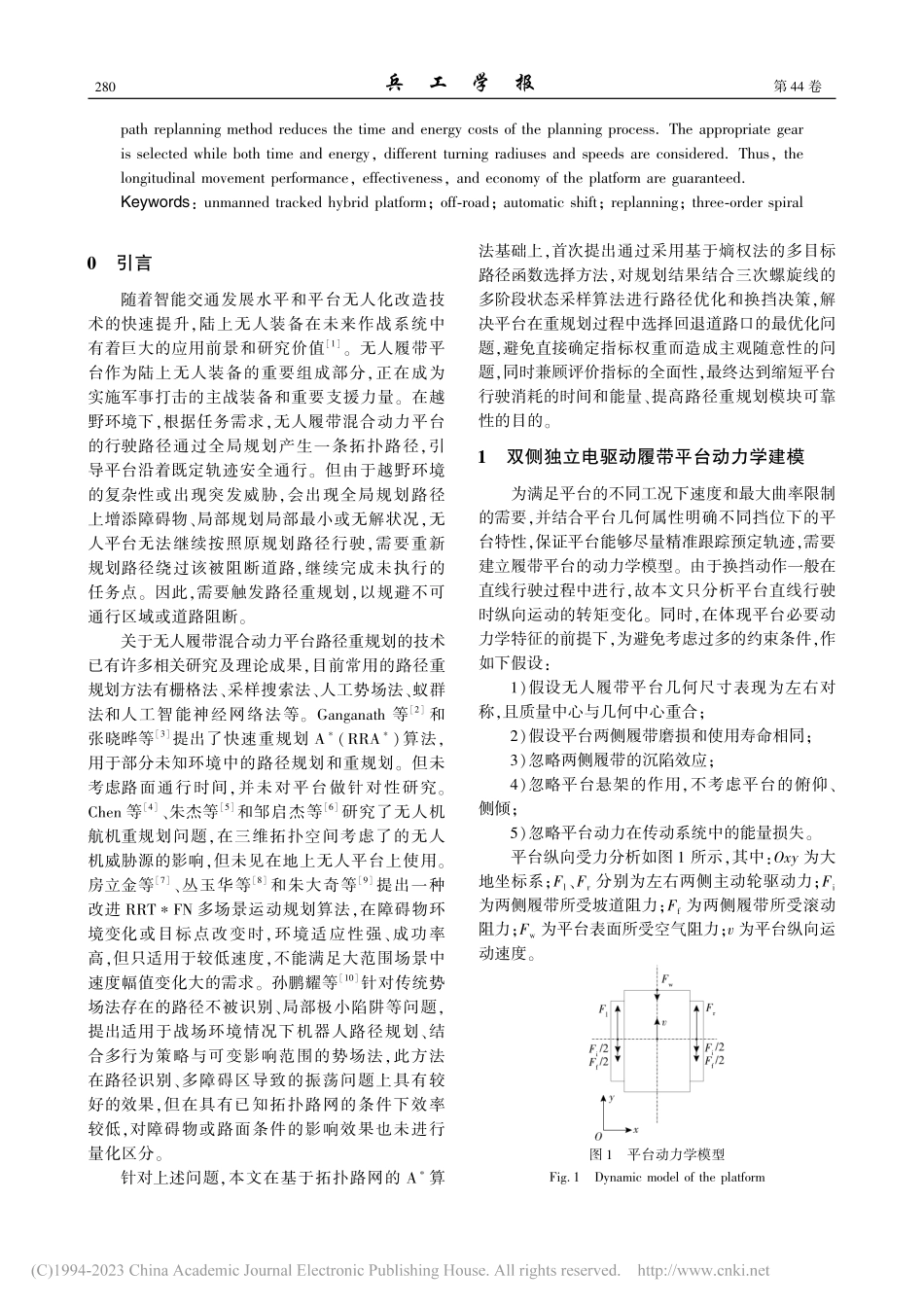
第44卷第1期2023年1月兵工学报ACTAARMAMENTARIIVol.44No.1Jan.2023DOI:10.12382/bgxb.2021.0827基于拓扑路网的多挡无人履带平台路径重规划刘龙龙,陈慧岩,刘海鸥,关海杰,卢佳兴(北京理工大学机械与车辆学院,北京100081)摘要:针对越野环境中无人履带混合动力平台重规划鲁棒性差、场景适应性弱的问题,提出一种通过融入多目标函数模型进行规划路径重构,采用三次螺旋线对重构路径进行多阶段采样优化来生成重规划路径的方法。该方法主要研究无人履带平台运动过程中行驶路径出现局部动态无解、全局规划被动触发重规划功能、重新生成可达目标点的参考轨迹的策略,重点解决重规划时回退道路行驶的成本最优问题。平台搭载两挡行星自动机械变速器,无人平台在行进过程中可根据行驶速度切换到不同挡位,以应对不同路面条件下的速度需求,保证平台具有较强的可通过性。通过实车平台验证新方法针对不同越野场景,根据通行时间、能量消耗和换挡次数的三参数目标代价函数模型,得到最佳的重规划策略并生成一条最优可通行路径。研究结果表明:基于拓扑路网的多挡无人履带平台路径重规划方法降低了重规划过程的时间和能量成本,在兼备考虑时间、能量以及不同转弯半径和速度时选择适当的挡位,确保平台纵向运动动力性的同时,也充分考虑了时效性和经济性。关键词:无人履带混合动力平台;越野环境;自动换挡;重规划;三次螺旋线中图分类号:TJ810.2文献标志码:A文章编号:1000⁃1093(2023)01⁃0279⁃11收稿日期:2021⁃12⁃04基金项目:国家自然科学基金项目(52172378)PathReplanningofMulti⁃speedUnmannedTrackedPlatformsBasedonTopologicalRoadNetworkLIULonglong,CHENHuiyan,LIUHai'ou,GUANHaijie,LUJiaxing(SchoolofMechanicalEngineering,BeijingInstituteofTechnology,Beijing100081,China)Abstract:Tosolvetheproblemofpoorrobustnessandweaksceneadaptabilityofreplanningforunmannedtra...