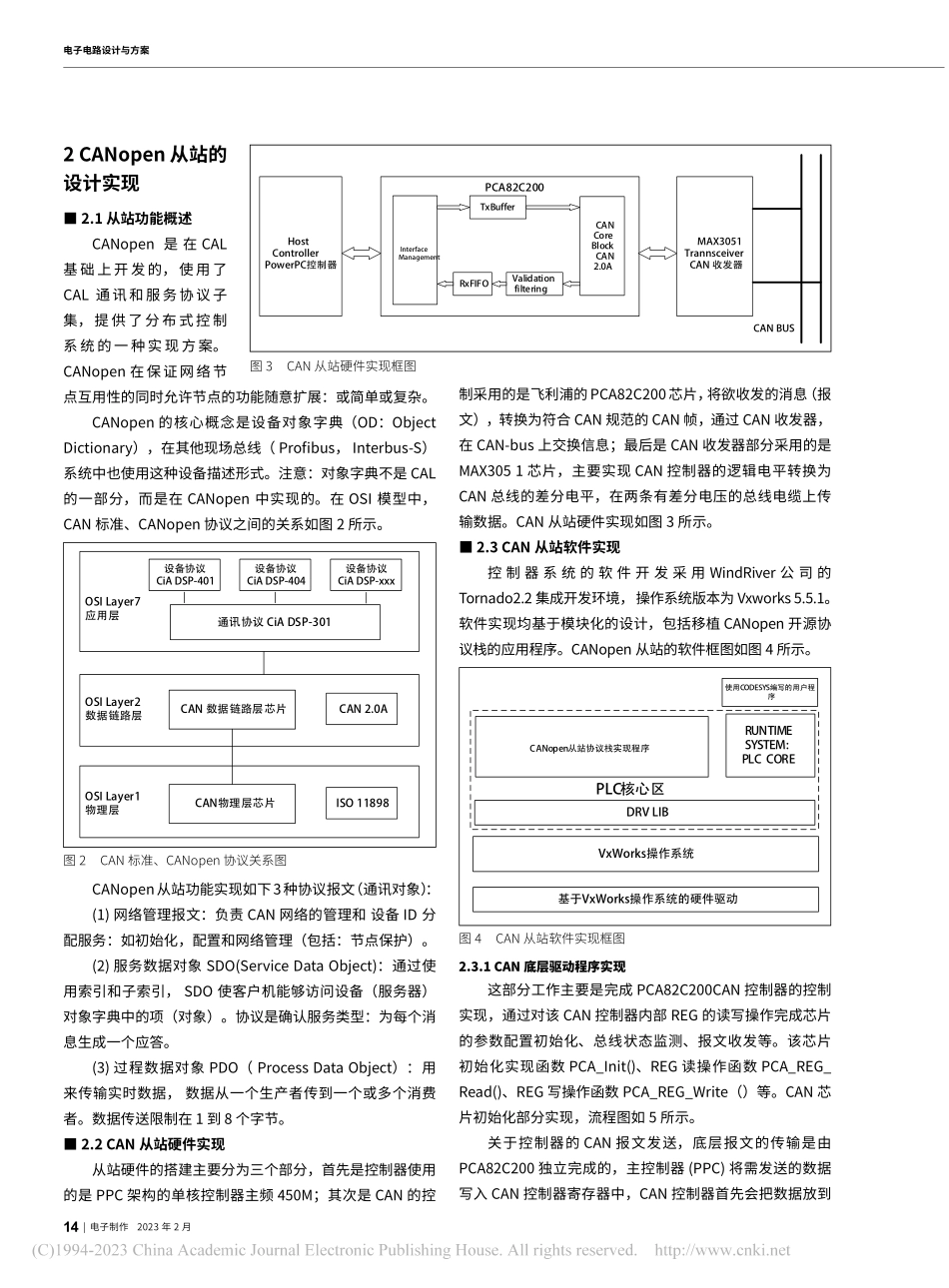
www·ele169·com|13电子电路设计与方案0引言风力发电作为能源主力军之一,在2020年持续维持高景气度,根据国家能源局公布的数据,继2010年以来,我国风电新增装机连续保持世界第一。全行业的产品升级迭代和科技进步不断得到推进,总线技术在风电项目中得到大量的应用。从OSI网络模型的角度来看同,现场总线网络一般只实现了第1层(物理层)、第2层(数据链路层)、第7层(应用层)。因为现场总线通常只包括一个网段,因此不需要第3层(传输层)和第4层(网层),也不需要第5层(会话层)第6层(描述层)的作用。其中CAN(ControllerAreaNetwork)现场总线仅仅定义了第1层、第2层(见ISO11898标准);实际设计中,这两层完全由硬件实现,设计人员无需再为此开发相关软件(Software)或固件(Firmware)。基于CAN的高层协议:CAL协议和基于CAL协议扩展的CANopen协议。CANopen协议是CAN-in-Automation(CiA)定义的标准之一,并且在发布后不久就获得了广泛的承认。相较于其他总线,由于CAN总线技术在通讯速率、通讯距离、错误处理能力等方面的综合优点,提高了系统的实时性、可靠性与灵活性,因此在现场设备中得到广泛运用。1总体设计这部分内容主要阐述系统的总体设计,根据实际采用的PPC硬件、软件操作系统及Codesys软件给出总体设计方案,明确设计过程中的技术要点。并结合CANopen开源协议栈,通过分析该协议框架后,给出使用方法。CANopen从站系统主要是为上层应用程序提供PDO数据交互功能。该功能实现主要包括以下部分:(1)用户程序的PDO数据交互实现是基于Vxworks和Codesys组件接口程序,实际的CANopen协议报文在PPC硬件上以驱动的形式实现。(2)CANopen协议部分的PDO、SDO、NMT等协议应用实现是基于开源CANopen协议。通过将该协议栈移植到PPC控制器上,来完成CAN应用层功能。(3)CANopen协议报文由CAN链路层的发送或接收完成,通过PPC硬件控制CAN链路层控制芯片和CAN的PHY芯片,最终实现与外部CAN主站的数据交互。CANopen总线网络由一个主设备和多个从设备构成分布系统,每个节点设备通过不同的COB-ID为标识。在Codesys应用程序开发过程中,可根据实际项目的开发将系统中任意满足协议要求的数据通过调用组件接口将其传到CANopen协议栈中对应的TPDO映射变量,同样也可通过调用组件接口获取协议栈中相应的RPDO映射变量的数据。以该形式即可完成CAN主站设备和CAN从站设备间的PDO交互。总体设计如图1所示。关于如何保证主从站数据交互的可靠性与实时性...