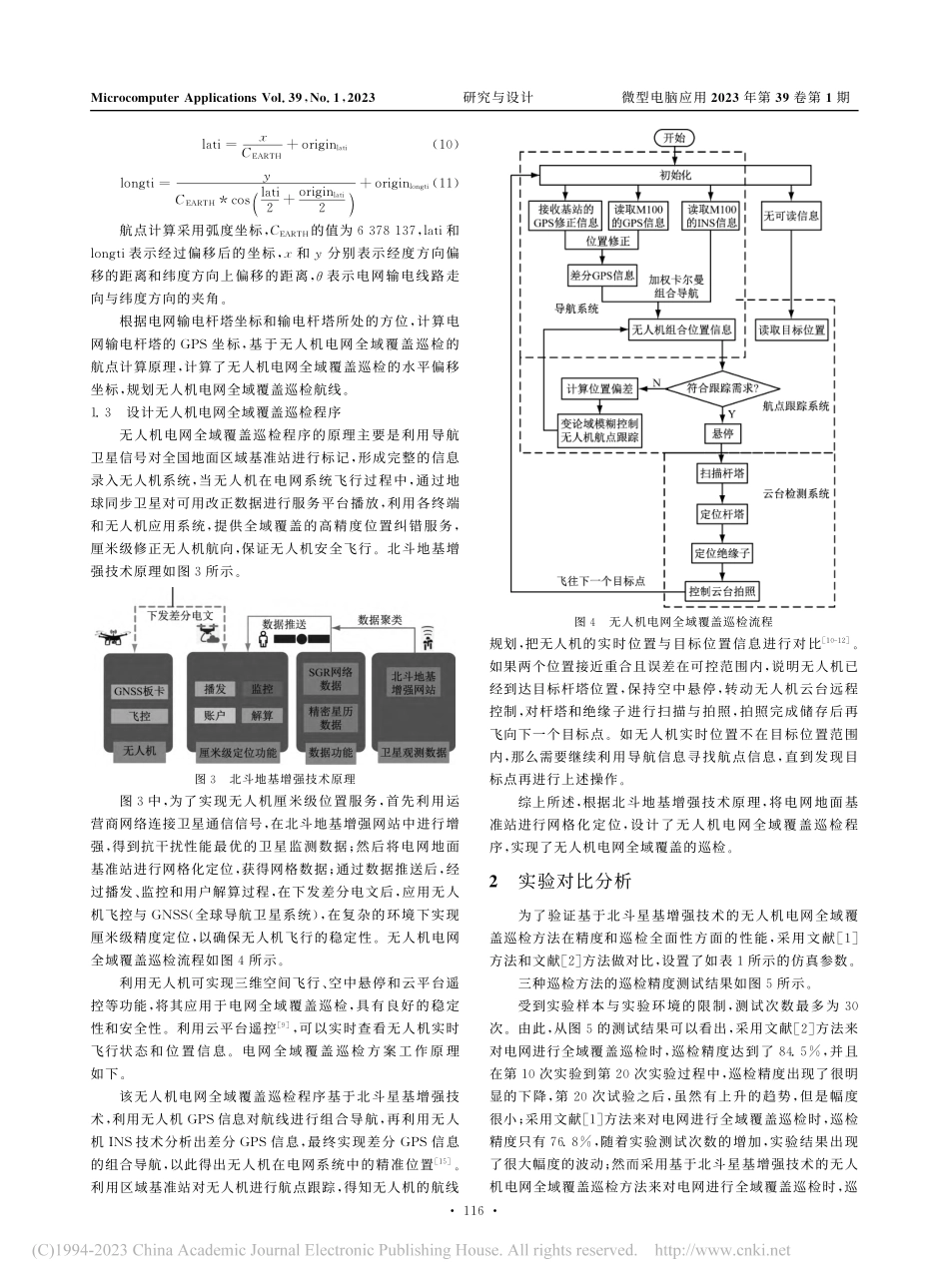
MicrocomputerApplicationsVol.39,No.1,2023研究与设计微型电脑应用2023年第39卷第1期作者简介:杨嘉妮(1990-),女,本科,助理工程师,研究方向为无人机巡检技术应用与研究、无人机数据深化应用;杨利波(1982-),男,本科,工程师,研究方向为无人机巡检技术应用与研究、无人机数据深化应用;何婕(1994-),女,硕士,研究方向为无人机巡检技术应用与研究、无人机数据深化应用;刘昊(1992-),男,本科,助理工程师,研究方向为卫星定位通信技术应用与研究、电力信息化。文章编号:1007-757X(2023)01-0114-04基于北斗星基增强技术的无人机电网全域覆盖巡检方法杨嘉妮1,杨利波2,何婕3,刘昊4(1.国网湖南省电力有限公司输电检修分公司,湖南,衡阳421000;2.智能带电作业技术及装备(机器人)湖南省重点实验室,湖南,长沙410004;3.国网带电巡检与智能作业技术公司实验室,湖南,长沙410100;4.千寻位置网络有限公司,上海200082)摘要:针对巡检过程中存在巡检精度低、范围小的问题,提出了基于北斗星增强技术的无人机电网全域覆盖巡检方法。由于电网全域覆盖图像的处理过程复杂,对电网全域覆盖图像进行了灰度变换,采用直线变换的方式,表示了电网全域覆盖图像的直线信息,提取到无人机电网全域覆盖图像特征。根据电网输电杆塔坐标和输电杆塔所处的方位,计算电网输电杆塔的GPS坐标,基于无人机电网全域覆盖巡检的航点计算原理,计算了无人机电网全域覆盖巡检的水平偏移坐标,规划无人机电网全域覆盖巡检航线。根据北斗地基增强技术原理,将电网地面基准站进行网格化定位,设计了无人机电网全域覆盖巡检程序,实现了无人机电网全域覆盖的巡检。实验结果表明,基于北斗星基增强技术的无人机电网全域覆盖巡检方法不仅可以提高无人机电网全域覆盖巡检精度,还可以提高巡检率,扩大了无人机电网全域覆盖巡检范围。关键词:北斗星基增强技术;无人机;电网全域覆盖;电力巡检中图分类号:TM727文献标志码:AGlobalCoverageInspectionMethodofUAVPowerGridbyBigDipper-basedEnhancementTechnologyYANGJiani1,YANGLibo2,HEJie3,LIUHao4(1.StateGridHun...