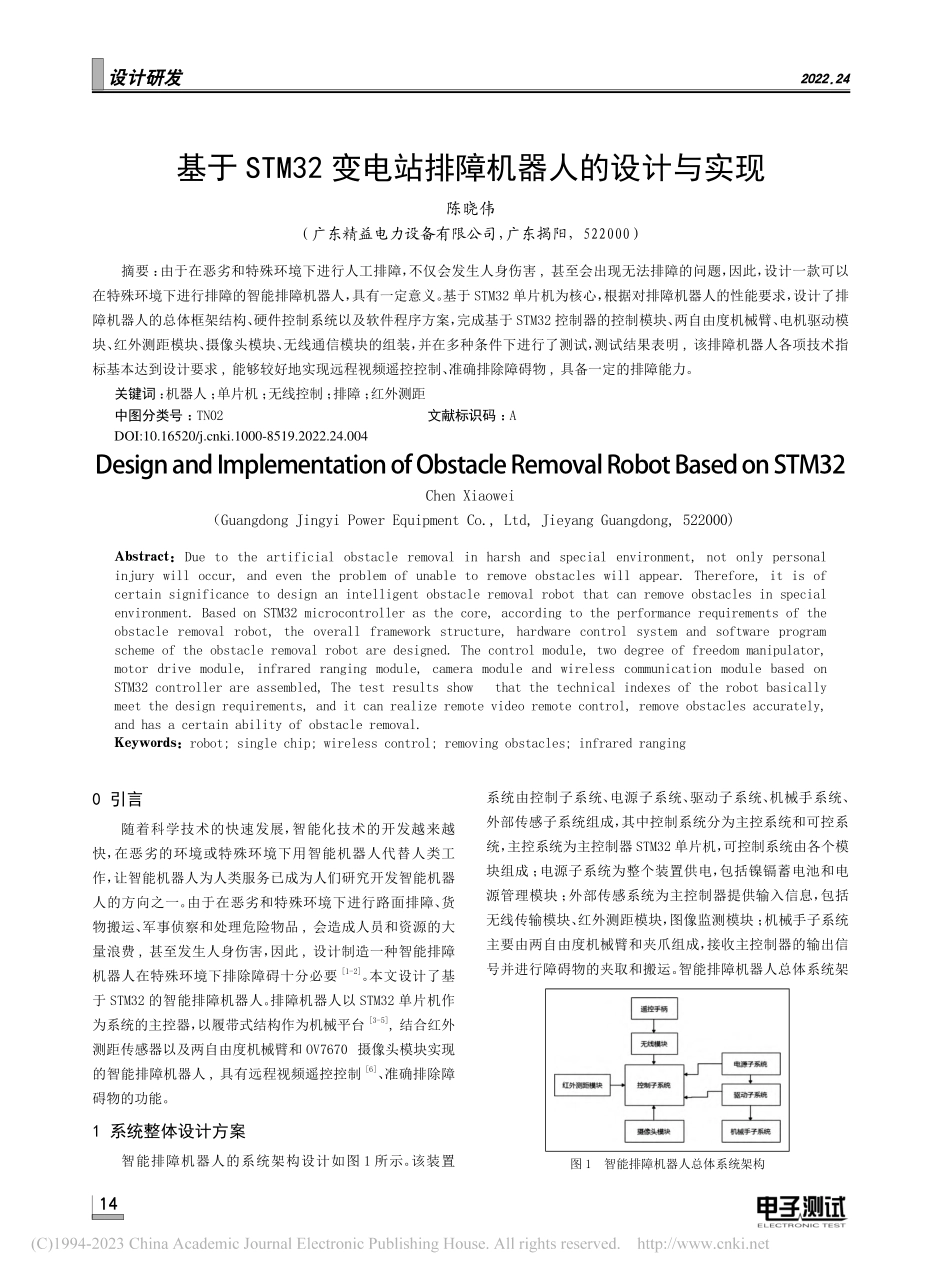
设计研发2022.24140引言随着科学技术的快速发展,智能化技术的开发越来越快,在恶劣的环境或特殊环境下用智能机器人代替人类工作,让智能机器人为人类服务已成为人们研究开发智能机器人的方向之一。由于在恶劣和特殊环境下进行路面排障、货物搬运、军事侦察和处理危险物品,会造成人员和资源的大量浪费,甚至发生人身伤害,因此,设计制造一种智能排障机器人在特殊环境下排除障碍十分必要[1-2]。本文设计了基于STM32的智能排障机器人。排障机器人以STM32单片机作为系统的主控器,以履带式结构作为机械平台[3-5],结合红外测距传感器以及两自由度机械臂和OV7670摄像头模块实现的智能排障机器人,具有远程视频遥控控制[6]、准确排除障碍物的功能。1系统整体设计方案智能排障机器人的系统架构设计如图1所示。该装置系统由控制子系统、电源子系统、驱动子系统、机械手系统、外部传感子系统组成,其中控制系统分为主控系统和可控系统,主控系统为主控制器STM32单片机,可控制系统由各个模块组成;电源子系统为整个装置供电,包括镍镉蓄电池和电源管理模块;外部传感系统为主控制器提供输入信息,包括无线传输模块、红外测距模块,图像监测模块;机械手子系统主要由两自由度机械臂和夹爪组成,接收主控制器的输出信号并进行障碍物的夹取和搬运。智能排障机器人总体系统架基于STM32变电站排障机器人的设计与实现陈晓伟(广东精益电力设备有限公司,广东揭阳,522000)摘要:由于在恶劣和特殊环境下进行人工排障,不仅会发生人身伤害,甚至会出现无法排障的问题,因此,设计一款可以在特殊环境下进行排障的智能排障机器人,具有一定意义。基于STM32单片机为核心,根据对排障机器人的性能要求,设计了排障机器人的总体框架结构、硬件控制系统以及软件程序方案,完成基于STM32控制器的控制模块、两自由度机械臂、电机驱动模块、红外测距模块、摄像头模块、无线通信模块的组装,并在多种条件下进行了测试,测试结果表明,该排障机器人各项技术指标基本达到设计要求,能够较好地实现远程视频遥控控制、准确排除障碍物,具备一定的排障能力。关键词:机器人;单片机;无线控制;排障;红外测距中图分类号:TN02文献标识码:ADesignandImplementationofObstacleRemovalRobotBasedonSTM32ChenXiaowei(GuangdongJingyiPowerEquipmentCo.,Ltd,JieyangGuangdong,522000)Abstract:Duetotheartificialobstacleremovalinharshandspecialenvironment,notonlypersonalinjurywillocc...