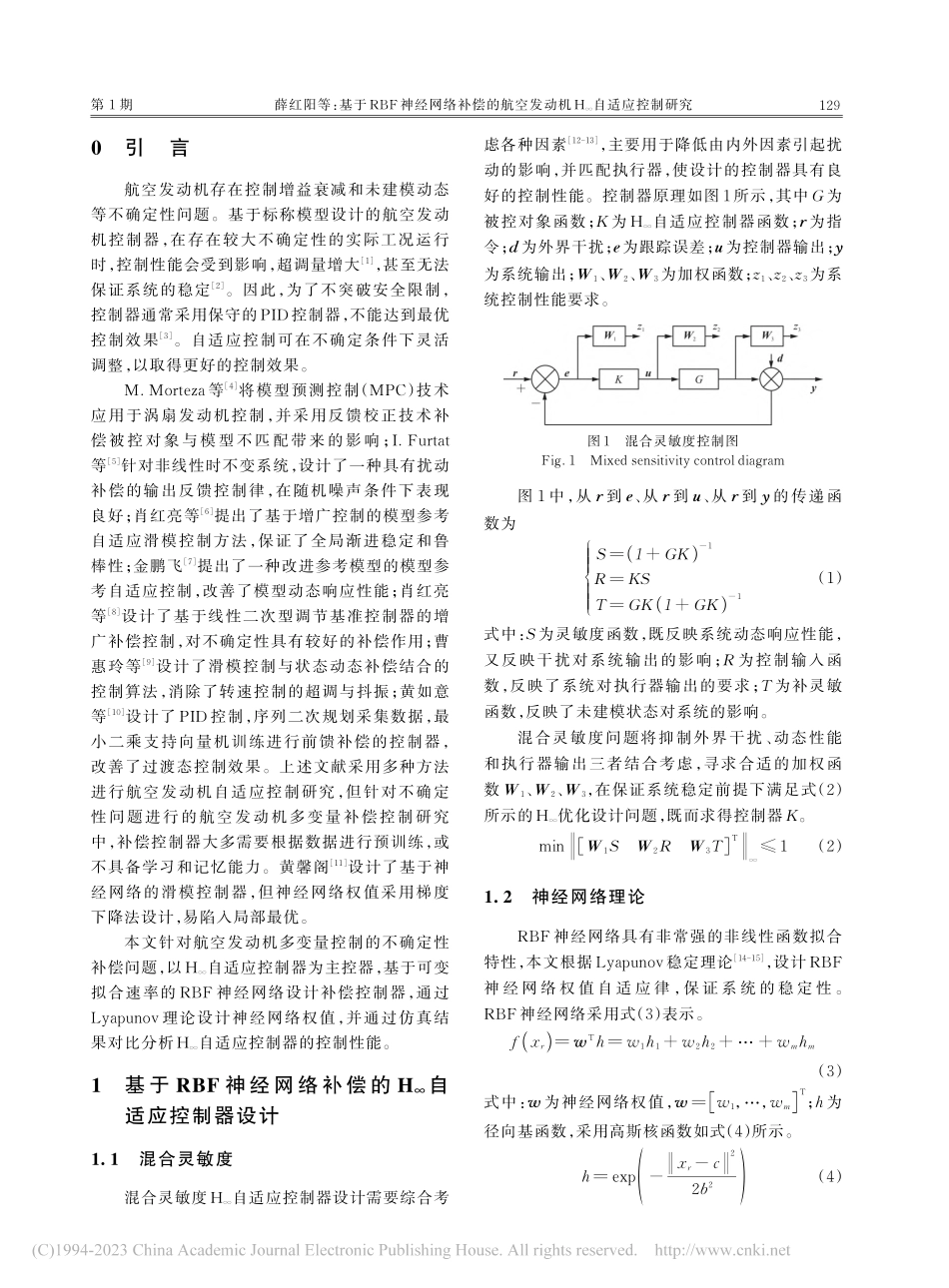
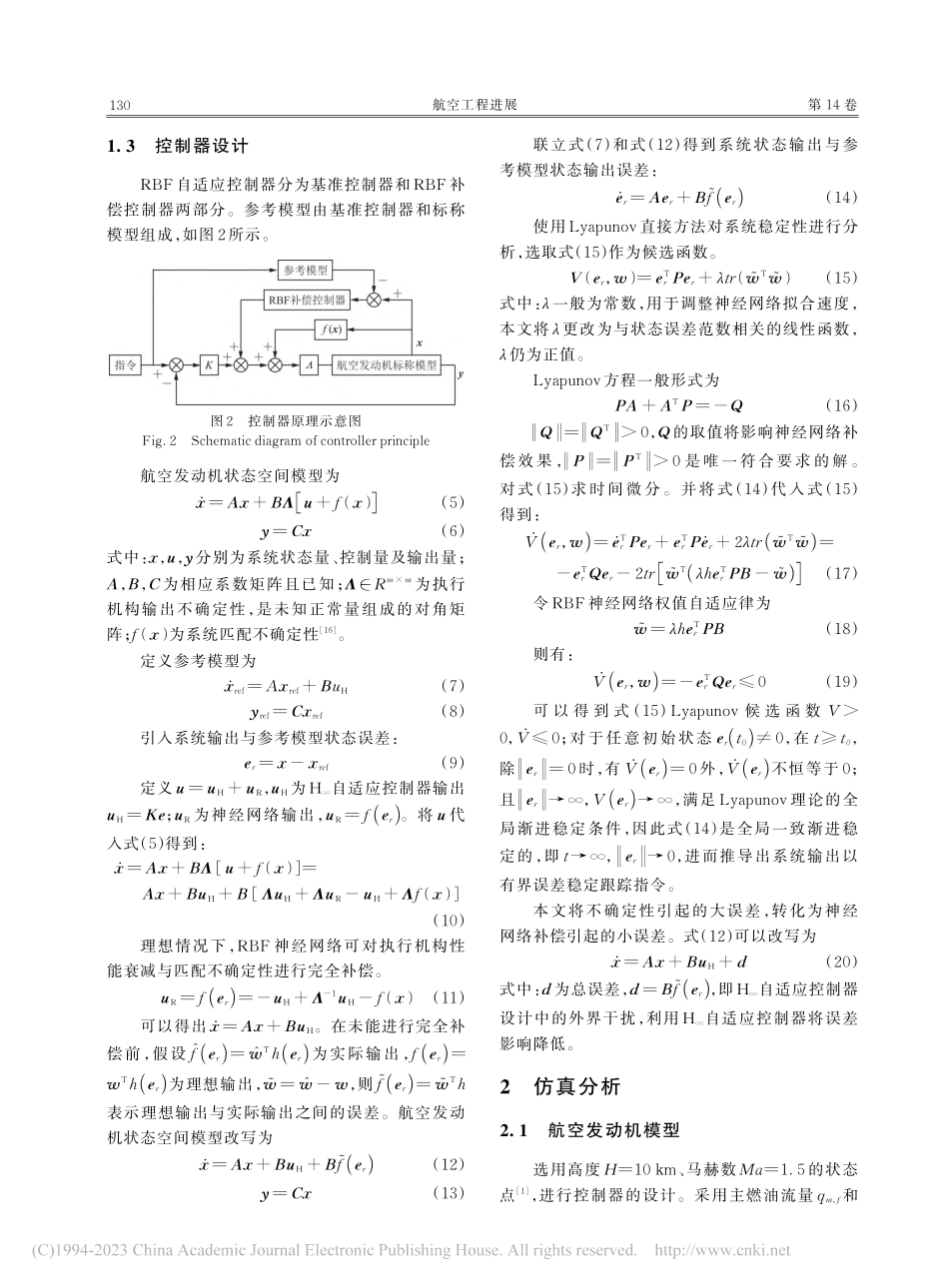
第14卷第1期2023年2月Vol.14No.1Feb.2023航空工程进展ADVANCESINAERONAUTICALSCIENCEANDENGINEERING基于RBF神经网络补偿的航空发动机H∞自适应控制研究薛红阳,蔡开龙,李黄琪,濮志刚(南昌航空大学飞行器工程学院,南昌330063)摘要:航空发动机控制系统是飞行器的重要机构,航空发动机存在的控制增益衰减和未建模动态等不确定性问题影响了其控制性能,为此设计将H∞自适应控制和补偿控制相结合的控制器。首先,基于混合灵敏度理论设计H∞自适应控制器;然后,基于Lyapunov严格稳定理论设计RBF神经网络补偿控制器对不确定性进行拟合补偿,并通过与误差相关的线性函数调整拟合速度;最后,以归一化后的航空发动机模型为被控对象进行多变量仿真试验。结果表明:本文设计的自适应控制器能够有效补偿不确定性,相比H∞控制器,超调量和调节时间都有所降低。关键词:航空发动机;多变量控制;不确定性;混合灵敏度;RBF神经网络补偿中图分类号:V233.7文献标识码:ADOI:10.16615/j.cnki.1674-8190.2023.01.15ResearchonH∞adaptivecontrolofaero-enginebasedonRBFneuralnetworkcompensationXUEHongyang,CAIKailong,LIHuangqi,PUZhigang(CollegeofAircraftEngineering,NanchangHangkongUniversity,Nanchang330063,China)Abstract:Aero-enginecontrolsystemisanimportantmechanismofaircraft,theuncertaintyofcontrolgainattenua⁃tionandunmodeleddynamicsofaero-enginecanaffectitscontrolperformance,therefore,acontrollercombiningH∞adaptivecontrolandcompensationcontrolisdesigned.Firstly,theH∞adaptivecontrollerisdesignedbasedonthemixedsensitivitytheory.Andthen,basedonLyapunovstrictstabilitytheory,theradialbasisfunction(RBF)neuralnetworkcompensationcontrollerisdesignedtocompensatetheuncertainty,andthefittingspeedisadjustedbythelinearfunctionrelatedtotheerror.Finally,thenormalizedaero-enginemodelistakenasthecontrolledob⁃jecttocarryoutthemulti-variablesimulationtest.Theresultsshowthattheadaptivecontrollerdesignedinthispa⁃percaneffectivelycompensatetheuncertaintyandreducetheovershootandadjustingtimecomparedwiththeH∞controller.Keywords:aero-engine;multi-variablecontrol;uncertainty;mixedsensitivity;RBFneuralnetworkcompensa⁃tion文章编号:1674-8190(2023...