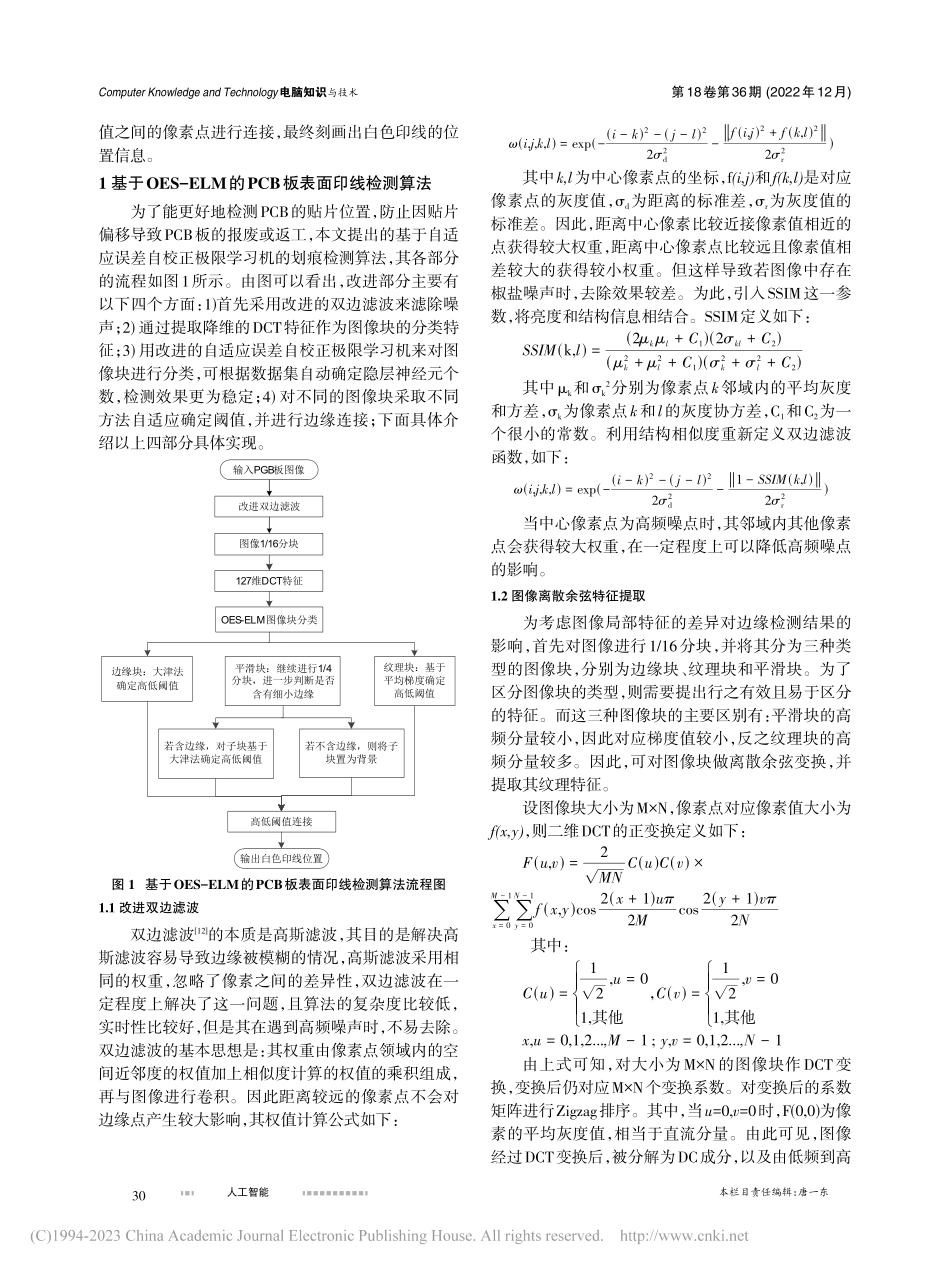
人工智能本栏目责任编辑:唐一东ComputerKnowledgeandTechnology电脑知识与技术第18卷第36期(2022年12月)基于OES-ELM的PCB板表面印线检测算法刘洋,孙龙洋,韩怡,柴广卿,张国良(潍柴动力股份有限公司,山东潍坊261000)摘要:为满足电子器件的大批量生产的需要,电子电路表面组装技术(SMT)逐渐发展起来,贴装位置的准确性严重影响着产品质量。电子产品不断趋于小型化、贴装位置边缘信息不明显、模组表面产生的划痕等原因,对贴装位置的精准确定造成很大的干扰,因此如何通过边缘检测的手段精准地确定贴装的位置则显得尤为关键。因此,文章提出了一种基于自适应误差自校正极限学习机(OES-ELM)的PCB板表面印线边缘检测算法。该算法首先用改进的双边滤波算法滤除图像噪声,该算法可较好的保持边缘信息;然后对图像进行分块,对各图像块分别提取其128维DCT特征输入OES-ELM分类器将图像块分为三类,并求得各图像块的梯度图;最后,针对不同类型的图像块的梯度图像,分别进行处理,确定高低阈值,将高低阈值之间的像素点进行连接,确定表面白色印线的轮廓信息。实验结果表明,该算法能快速识别出印线边缘信息,有实际应用价值。关键词:机器视觉;SMT;双边滤波;OES-ELM;阈值连接中图分类号:TP18文献标识码:A文章编号:1009-3044(2022)36-0029-04开放科学(资源服务)标识码(OSID):电子器件制造技术的快速发展对PCB板自动贴装设备带来商机的同时,也带来了更为严峻的技术考验[1]。目前,国内多家企业着手全自动贴装设备的研发,部分设备流入市场,但在贴装精度和速度上与发达国家相比有一定差距,严重制约着生产效率提升。因此,如何提高电子器件生产过程中PCB板贴装位置的快速、精准定位,对提高生产效率、提高产品质量具有重要的研究意义。PCB板表面白色印线边缘位置的获取通过图像处理实现。因PCB板边缘与周围背景相比,有着一定的梯度跳变,可通过边缘检测的手段实现边缘位置确定。但受PCB板贴装位置边缘信息不明显、模组表面产生的划痕等原因的干扰,通过传统边缘检测算法实现PCB板快速、稳定、高精准度的边缘检测仍具有一定的挑战。目前,边缘检测算法主要存在以下几类:1)基于小波变换(wavelettransform)的检测算法[2];2)基于形态梯度理论的检测算法[3];3)基于Canny的检测算法[4];4)基于机器学习的检测算法[5]等。基于小波变换[6]的检测算法,通过对图像进行不同尺度的小波变换来实现,但受尺度大小的影响,当尺度过大或过...