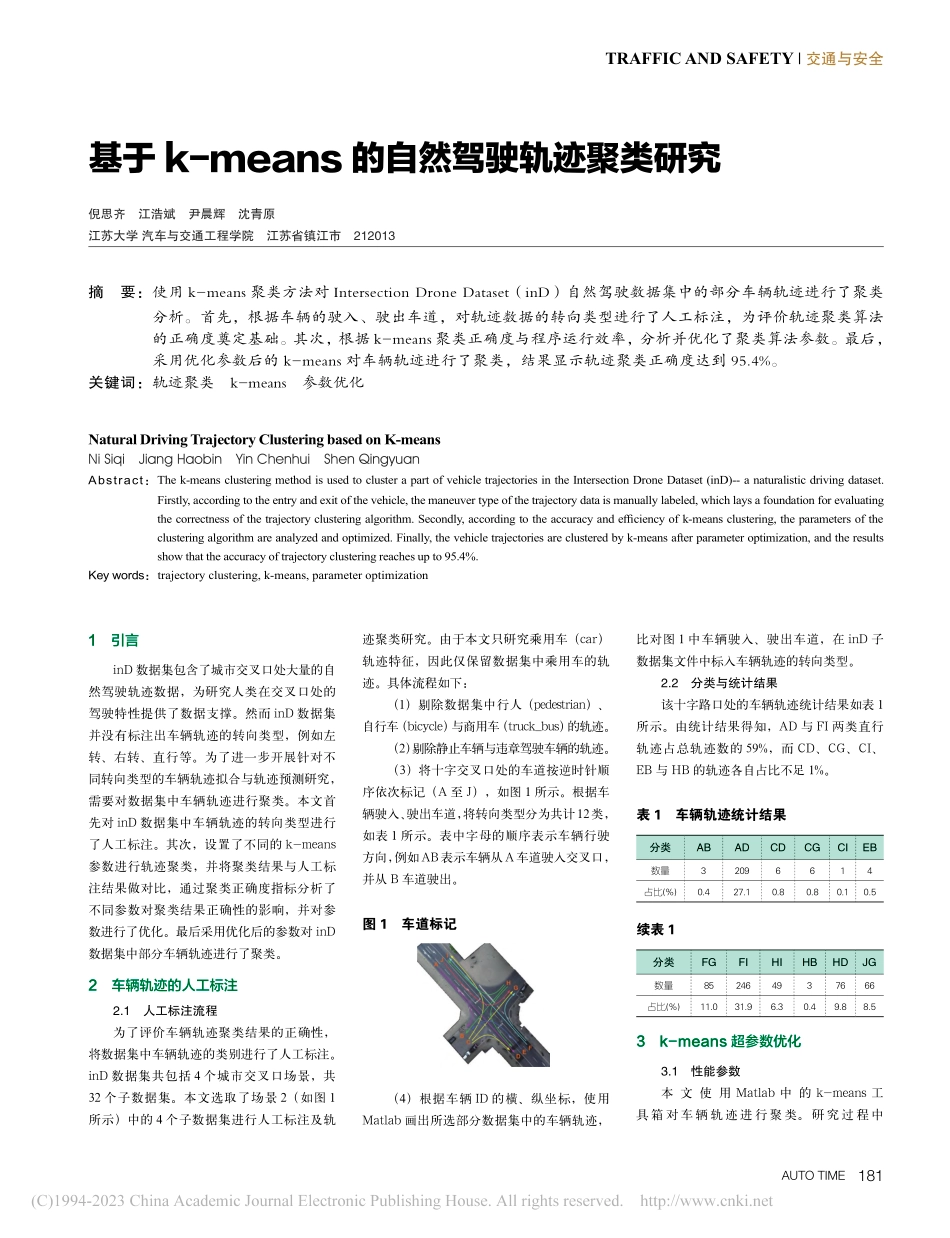
AUTOTIME181TRAFFICANDSAFETY|交通与安全基于k-means的自然驾驶轨迹聚类研究倪思齐江浩斌尹晨辉沈青原江苏大学汽车与交通工程学院江苏省镇江市212013摘要:使用k-means聚类方法对IntersectionDroneDataset(inD)自然驾驶数据集中的部分车辆轨迹进行了聚类分析。首先,根据车辆的驶入、驶出车道,对轨迹数据的转向类型进行了人工标注,为评价轨迹聚类算法的正确度奠定基础。其次,根据k-means聚类正确度与程序运行效率,分析并优化了聚类算法参数。最后,采用优化参数后的k-means对车辆轨迹进行了聚类,结果显示轨迹聚类正确度达到95.4%。关键词:轨迹聚类k-means参数优化1引言inD数据集包含了城市交叉口处大量的自然驾驶轨迹数据,为研究人类在交叉口处的驾驶特性提供了数据支撑。然而inD数据集并没有标注出车辆轨迹的转向类型,例如左转、右转、直行等。为了进一步开展针对不同转向类型的车辆轨迹拟合与轨迹预测研究,需要对数据集中车辆轨迹进行聚类。本文首先对inD数据集中车辆轨迹的转向类型进行了人工标注。其次,设置了不同的k-means参数进行轨迹聚类,并将聚类结果与人工标注结果做对比,通过聚类正确度指标分析了不同参数对聚类结果正确性的影响,并对参数进行了优化。最后采用优化后的参数对inD数据集中部分车辆轨迹进行了聚类。2车辆轨迹的人工标注2.1人工标注流程为了评价车辆轨迹聚类结果的正确性,将数据集中车辆轨迹的类别进行了人工标注。inD数据集共包括4个城市交叉口场景,共32个子数据集。本文选取了场景2(如图1所示)中的4个子数据集进行人工标注及轨迹聚类研究。由于本文只研究乘用车(car)轨迹特征,因此仅保留数据集中乘用车的轨迹。具体流程如下:(1)剔除数据集中行人(pedestrian)、自行车(bicycle)与商用车(truck_bus)的轨迹。(2)剔除静止车辆与违章驾驶车辆的轨迹。(3)将十字交叉口处的车道按逆时针顺序依次标记(A至J),如图1所示。根据车辆驶入、驶出车道,将转向类型分为共计12类,如表1所示。表中字母的顺序表示车辆行驶方向,例如AB表示车辆从A车道驶入交叉口,并从B车道驶出。图1车道标记(4)根据车辆ID的横、纵坐标,使用Matlab画出所选部分数据集中的车辆轨迹,比对图1中车辆驶入、驶出车道,在inD子数据集文件中标入车辆轨迹的转向类型。2.2分类与统计结果该十字路口处的车辆轨迹统计结果如表1所示。由统计结果得知,AD与FI两类直行轨迹占总轨迹数的59%,而CD、CG、CI、EB与HB的轨迹各自占比不...