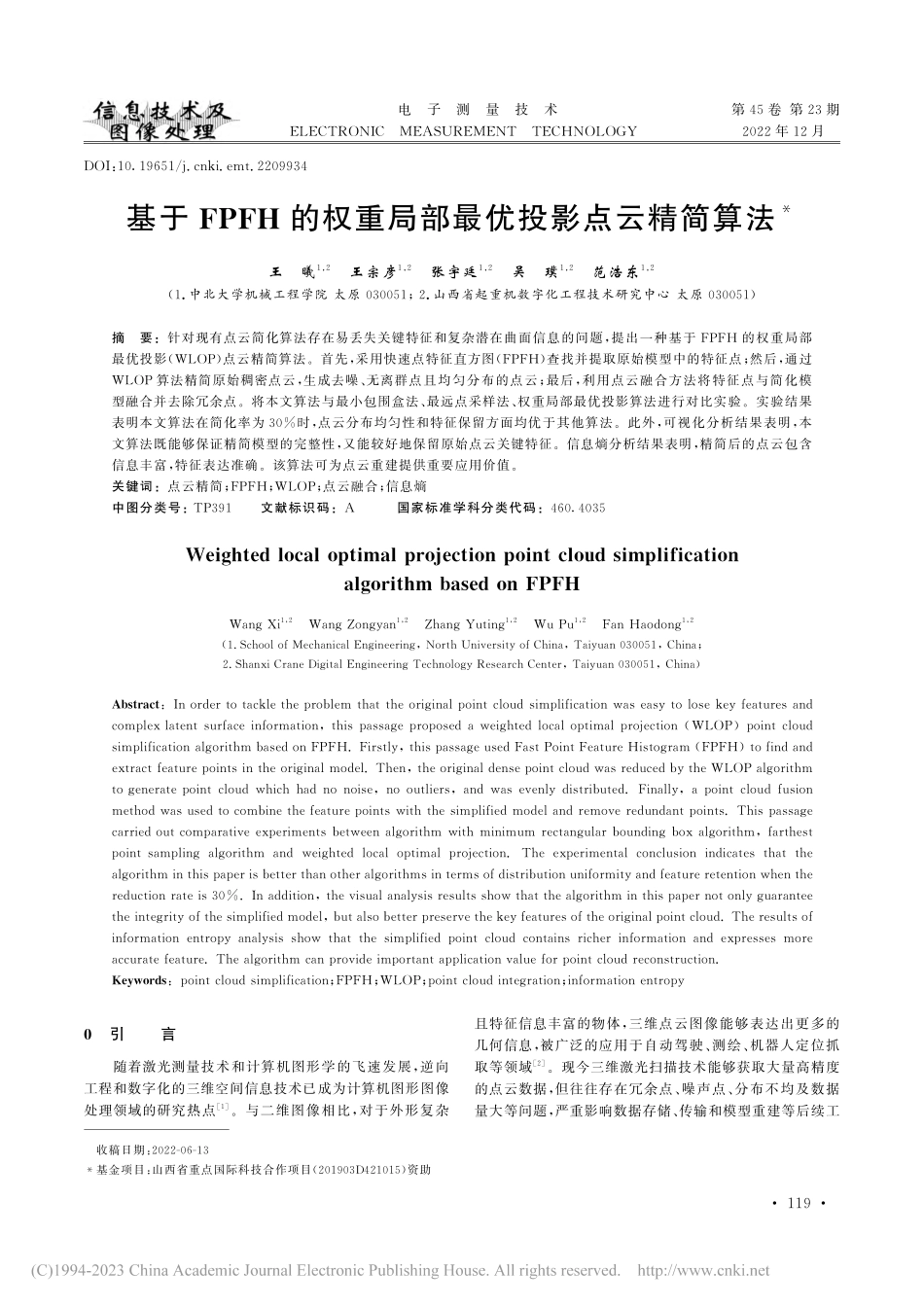
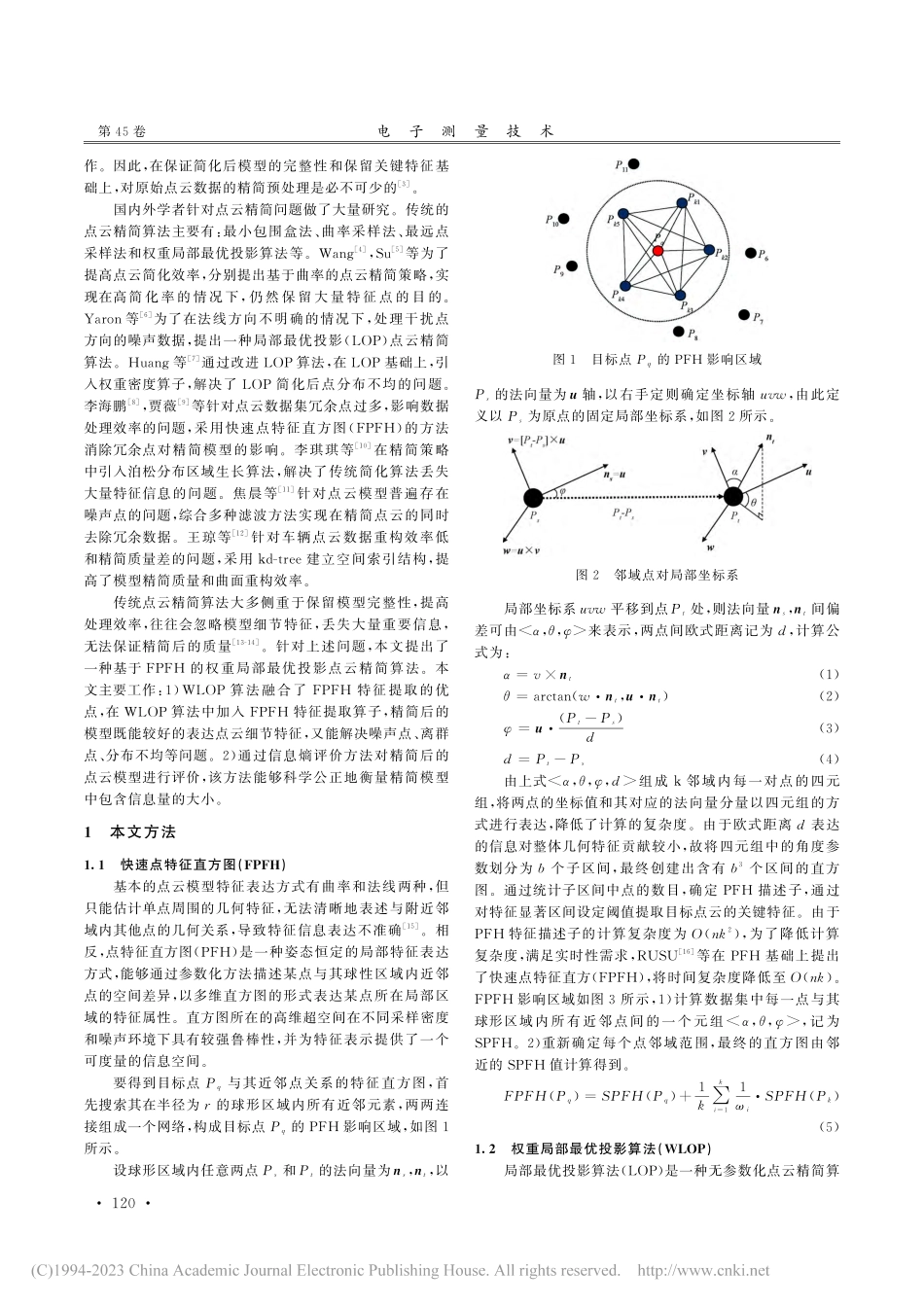
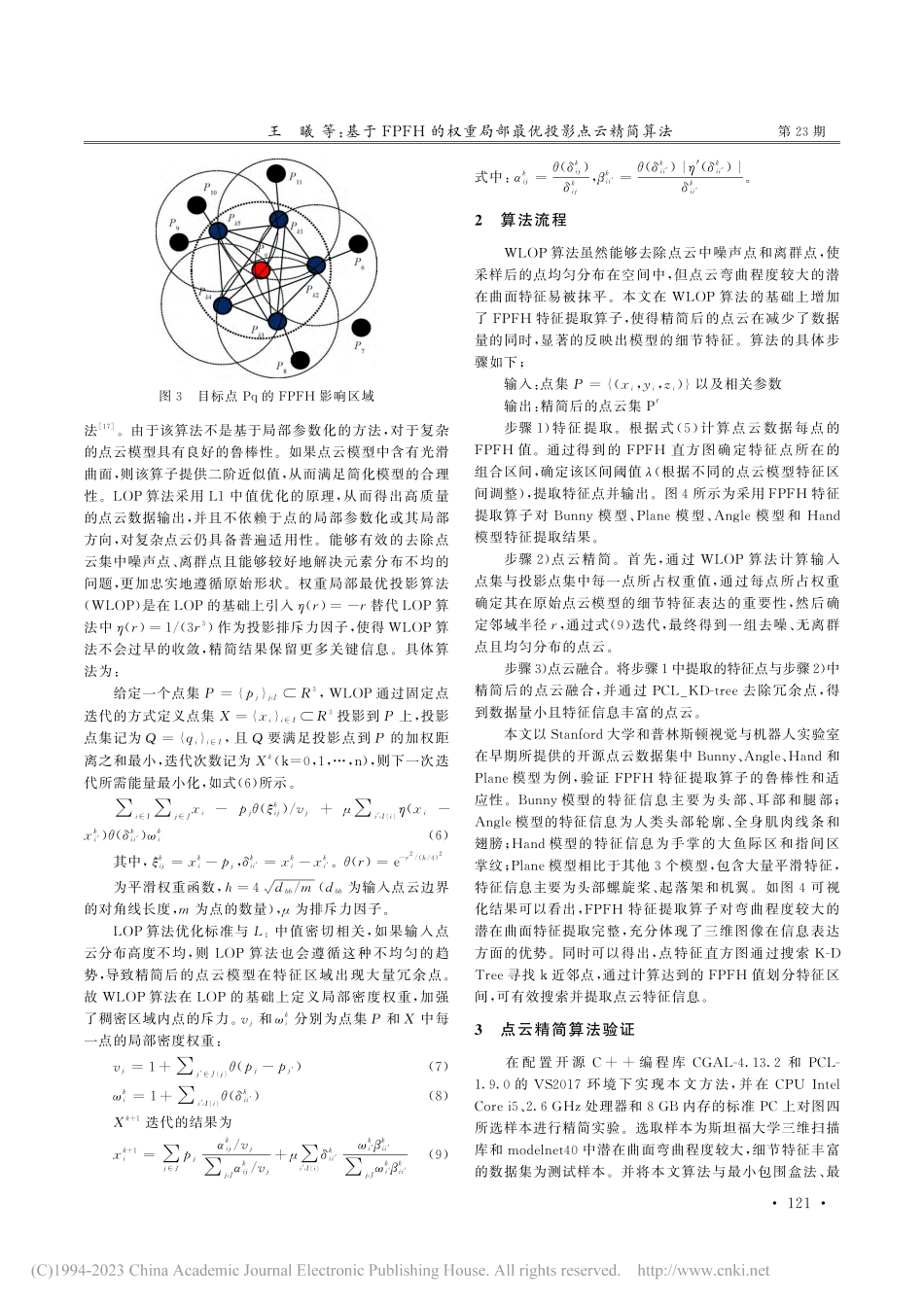
电子测量技术ELECTRONICMEASUREMENTTECHNOLOGY第45卷第23期2022年12月DOI:10.19651/j.cnki.emt.2209934基于FPFH的权重局部最优投影点云精简算法*王曦1,2王宗彦1,2张宇廷1,2吴璞1,2范浩东1,2(1.中北大学机械工程学院太原030051;2.山西省起重机数字化工程技术研究中心太原030051)摘要:针对现有点云简化算法存在易丢失关键特征和复杂潜在曲面信息的问题,提出一种基于FPFH的权重局部最优投影(WLOP)点云精简算法。首先,采用快速点特征直方图(FPFH)查找并提取原始模型中的特征点;然后,通过WLOP算法精简原始稠密点云,生成去噪、无离群点且均匀分布的点云;最后,利用点云融合方法将特征点与简化模型融合并去除冗余点。将本文算法与最小包围盒法、最远点采样法、权重局部最优投影算法进行对比实验。实验结果表明本文算法在简化率为30%时,点云分布均匀性和特征保留方面均优于其他算法。此外,可视化分析结果表明,本文算法既能够保证精简模型的完整性,又能较好地保留原始点云关键特征。信息熵分析结果表明,精简后的点云包含信息丰富,特征表达准确。该算法可为点云重建提供重要应用价值。关键词:点云精简;FPFH;WLOP;点云融合;信息熵中图分类号:TP391文献标识码:A国家标准学科分类代码:460.4035WeightedlocaloptimalprojectionpointcloudsimplificationalgorithmbasedonFPFHWangXi1,2WangZongyan1,2ZhangYuting1,2WuPu1,2FanHaodong1,2(1.SchoolofMechanicalEngineering,NorthUniversityofChina,Taiyuan030051,China;2.ShanxiCraneDigitalEngineeringTechnologyResearchCenter,Taiyuan030051,China)Abstract:Inordertotackletheproblemthattheoriginalpointcloudsimplificationwaseasytolosekeyfeaturesandcomplexlatentsurfaceinformation,thispassageproposedaweightedlocaloptimalprojection(WLOP)pointcloudsimplificationalgorithmbasedonFPFH.Firstly,thispassageusedFastPointFeatureHistogram(FPFH)tofindandextractfeaturepointsintheoriginalmodel.Then,theoriginaldensepointcloudwasreducedbytheWLOPalgorithmtogeneratepointcloudwhichhadnonoise,nooutliers,andwasevenlydistributed.Finally,apointcloudfusionmethodwasusedtocombinethefeaturepointswiththesimplifiedmodelandremoveredundantpoints.Thispassagecarriedoutcomparativeexperimentsbetweenalgorithmwithminimumrectangularboundingboxalgorithm,farthestpointsamplingalgorithmandwe...