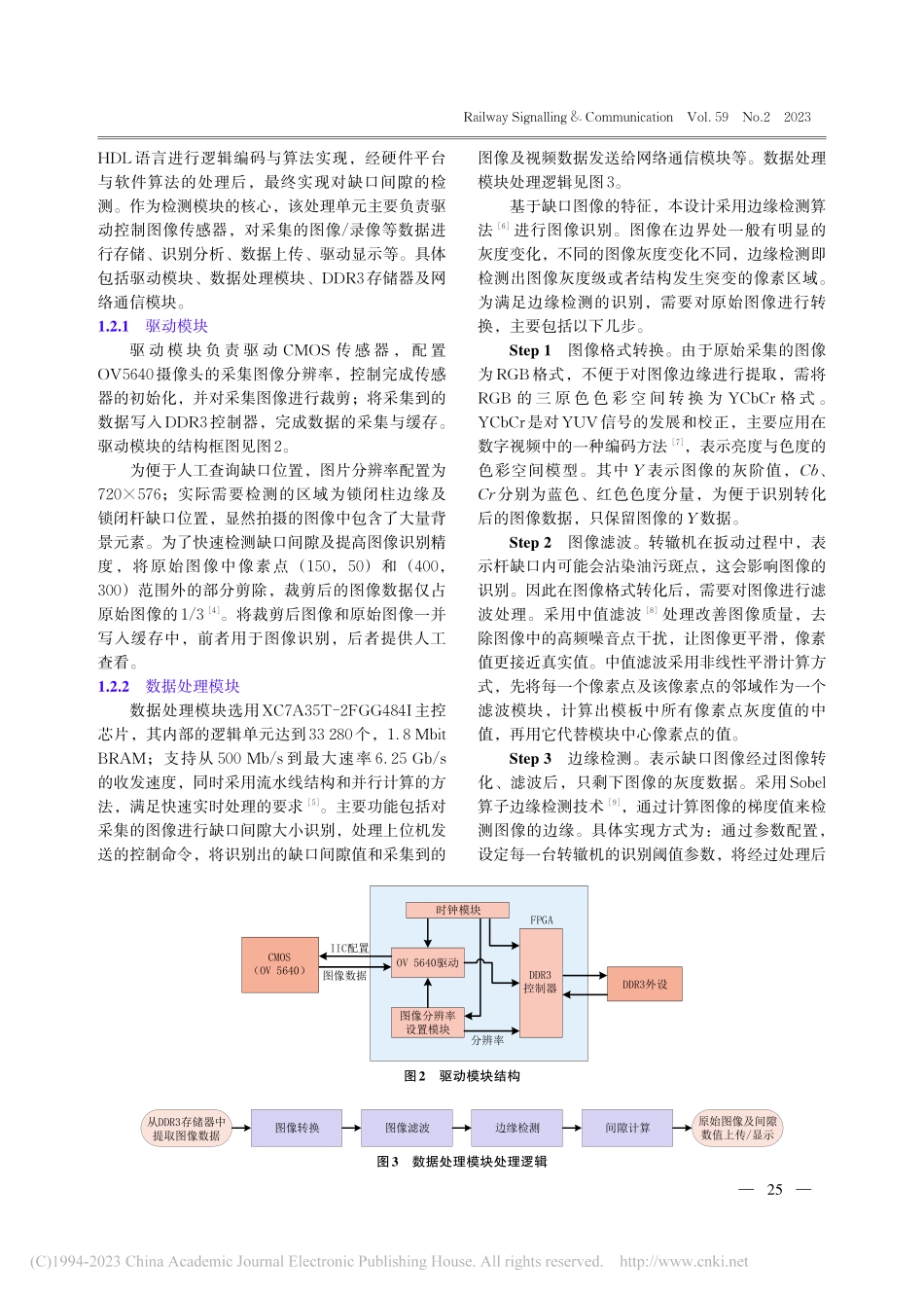
2023年2月第59卷第2期铁道通信信号RailwaySignalling&CommunicationFebruary2023Vol.59No.2基于FPGA的转辙机表示缺口检测模块设计叶斌,杨云国摘要:为达到道岔转辙机表示缺口间隙自动检测的目的,提出一种基于FPGA的转辙机表示缺口检测模块设计方案。该方案可对转辙机锁闭柱及锁闭杆的缺口图像进行自动裁剪、中值滤波及边缘检测,并通过边缘计算得出锁闭柱落入锁闭杆缺口后的间隙大小。给出了总体原理框图及主要检测算法,并选用OV5640摄像头和基于XC7A35T核心采集处理分机,实现对ZYJ7型转辙机表示缺口的检测。检测结果表明:该检测模块检测速度快、精度高,完全满足现场使用要求。关键词:缺口间隙;现场可编辑逻辑门阵列;中值滤波;边缘检测中图分类号:U216;U284文献标识码:ADesignofGapDetectionSystemforSwitchMachineBasedonFPGAYEBin,YANGYunguoAbstract:Inordertoachievethegoalofautomaticdetectionofgapindicationofswitchmachine,adesignschemeofgapindicationdetectionmoduleofswitchmachinebasedonFPGAisproposed.Automaticcutting,medianfilteringandedgedetectioncanbecompletedforthenotchimagesofthelockingcolumnandlockingrodoftheswitchmachine,andthegapsizeafterthelockingcolumnfallsintothenotchofthelockingrodcanbeobtainedthroughedgecomputing.Thispapergivestheoverallprincipleblockdiagramandmaindetectionalgorithms,andselectsOV5640cameraandXC7a35TcoreacquisitionandprocessingunittodetectthegapofZYJ7switchmachine.Thedetectionresultsshowthatthedetectionsystemdesignedinthispaperhasthecharacteristicsofhighspeedandhighprecision,fullymeetstherequirementsofon-siteuse.Keywords:Gap;Fieldprogrammablegatearray(FPGA);Medianfiltering;Imageedgedetection转辙机是道岔转换的驱动设备,转辙机锁闭柱落入锁闭杆后缺口的间隙(宽度)过大或者过小,都会影响转辙机的正常锁闭,从而导致道岔无法转换到位,影响运输安全。因此必须对转辙机表示缺口的变化进行全程的在线检测。目前已经上道使用的转辙机表示缺口检测系统大多是在转辙机内安装图像传感器,将采集到的图像压缩后,通过电力载波传输至机械室内的上位叶斌:上海铁大电信科技股份有限公司工程师200070上海杨云国:上海铁大电信科技股份有限公司高级工程师200070上海基金项目:中国铁路南昌局集团有限公司科研项目(202106)收稿日...