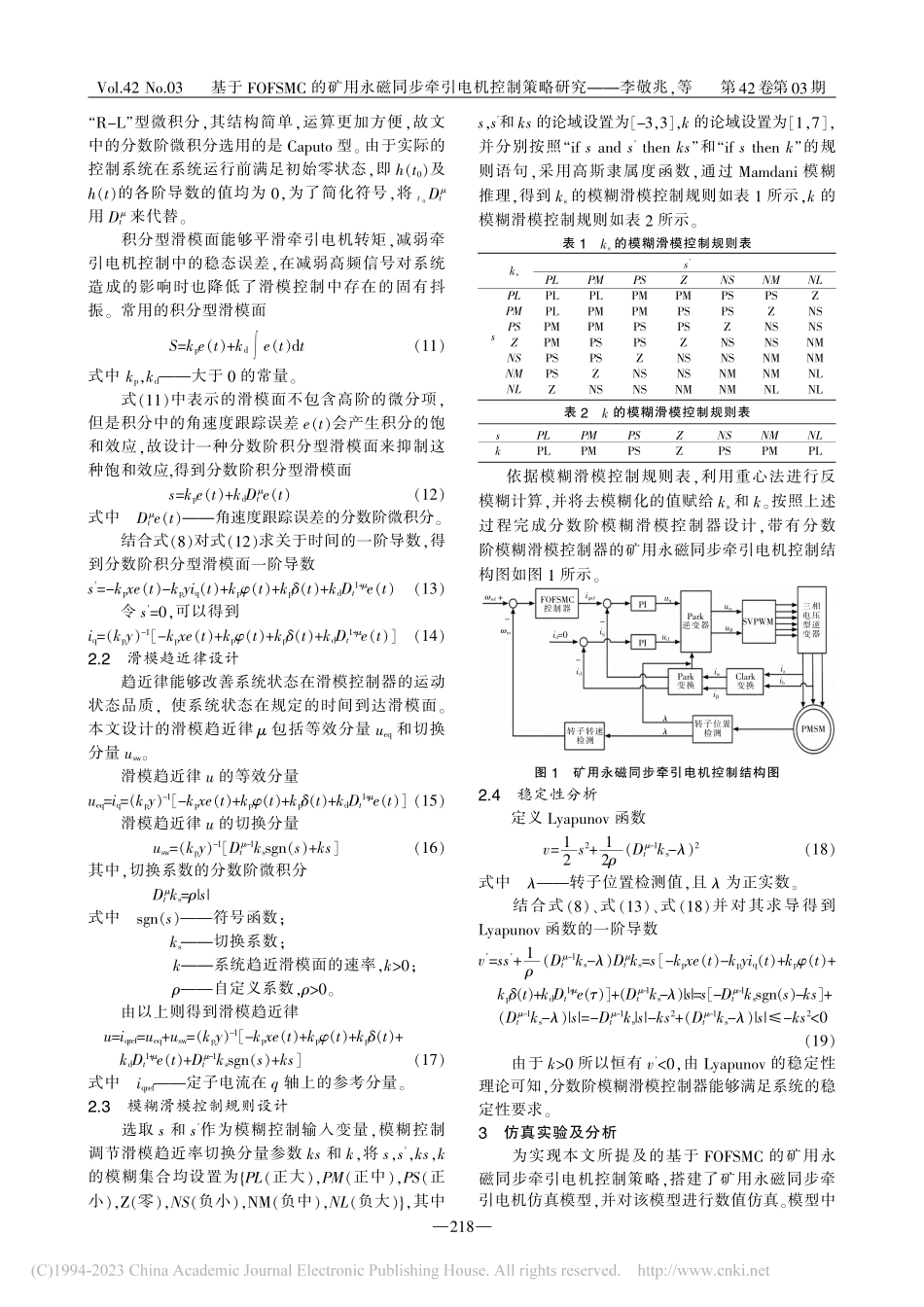
第42卷第03期2023年03月煤炭技术CoalTechnologyVol.42No.03Mar.2023doi:10.13301/j.cnki.ct.2023.03.042煤矿机电与信息化■■■■■■■■■■■■■■■■■■0引言矿用永磁同步牵引电机(简称牵引电机)是矿用电机车的牵引动力系统,是井下运输系统中极为重要的组成部分。近年来,永磁同步电机逐渐成为矿用电机车牵引装置的首选。然而,牵引电机是典型的强耦合、多变量系统,其性能对外界负载扰动、系统参数变化非常敏感,在一定条件下,会出现混沌动力学状态。故采用稳定、高性能的控制方案对牵引电机进行控制十分重要。本文针对牵引电机的实际运行特点,选取永磁体贴面式的矿用永磁同步牵引电机作为研究对象,在SMC控制方法的基础上结合分数阶微积分的记忆特性以及模糊控制的鲁棒性,设计了一种分数阶模糊滑模控制器FOFSMC来优化牵引电机的调速*科技部国家重点研发计划(2020YFB1314100);安徽省重点研发计划国际科技合作专项(202004b11020029);国家自然科学基金项目(51874010;61170060)基于FOFSMC的矿用永磁同步牵引电机控制策略研究*李敬兆1,2,鲁良伟1,周华平2,郑昌陆3,王国锋4,郑益飞4(1.安徽理工大学电气与信息工程学院,安徽淮南232001;2.安徽理工大学计算机科学与工程学院,安徽淮南232001;3.上海申传电气股份有限公司,上海201800;4.淮南矿业集团,安徽淮南232001)摘要:为解决矿用电机车因运行工况复杂导致的牵引电机调速困难,设计了一种分数阶模糊滑模控制器(FOFSMC)来改善牵引电机的调速性能。通过设计分数阶积分型滑模面来消除积分滑模面的饱和效应,降低滑模控制的固有抖振;通过模糊滑模控制规则来优化牵引电机状态在分数阶滑模面的运动品质,使其状态在有限时间内迅速到达滑模面。依据Lyapunov稳定性分析方法证明了所设计控制策略的稳定性。仿真测试结果表明,存在外部负载干扰的情况下,FOFSMC较于SMC控制策略对于给定转速的跟踪响应更快;当负载突变时,FOFSMC控制下的系统超调量更小。矿用永磁同步牵引电机在所设计的FOFSMC控制下,有着良好的鲁棒性和动态响应性能。关键词:牵引电机;矿用电机车;分数阶积分;模糊滑模控制;FOFSMC中图分类号:TD64;TM351文献标志码:A文章编号:1008-8725(2023)03-216-04ResearchonControlStrategyofMiningPermanentMagnetSynchronousTractionMotorBasedonFOFSMCLIJingzhao1,2,LULiangwei1,ZHOUHuaping2,ZHENGChanglu3,WANGGuofeng4,ZHENGYifei4(1.School...