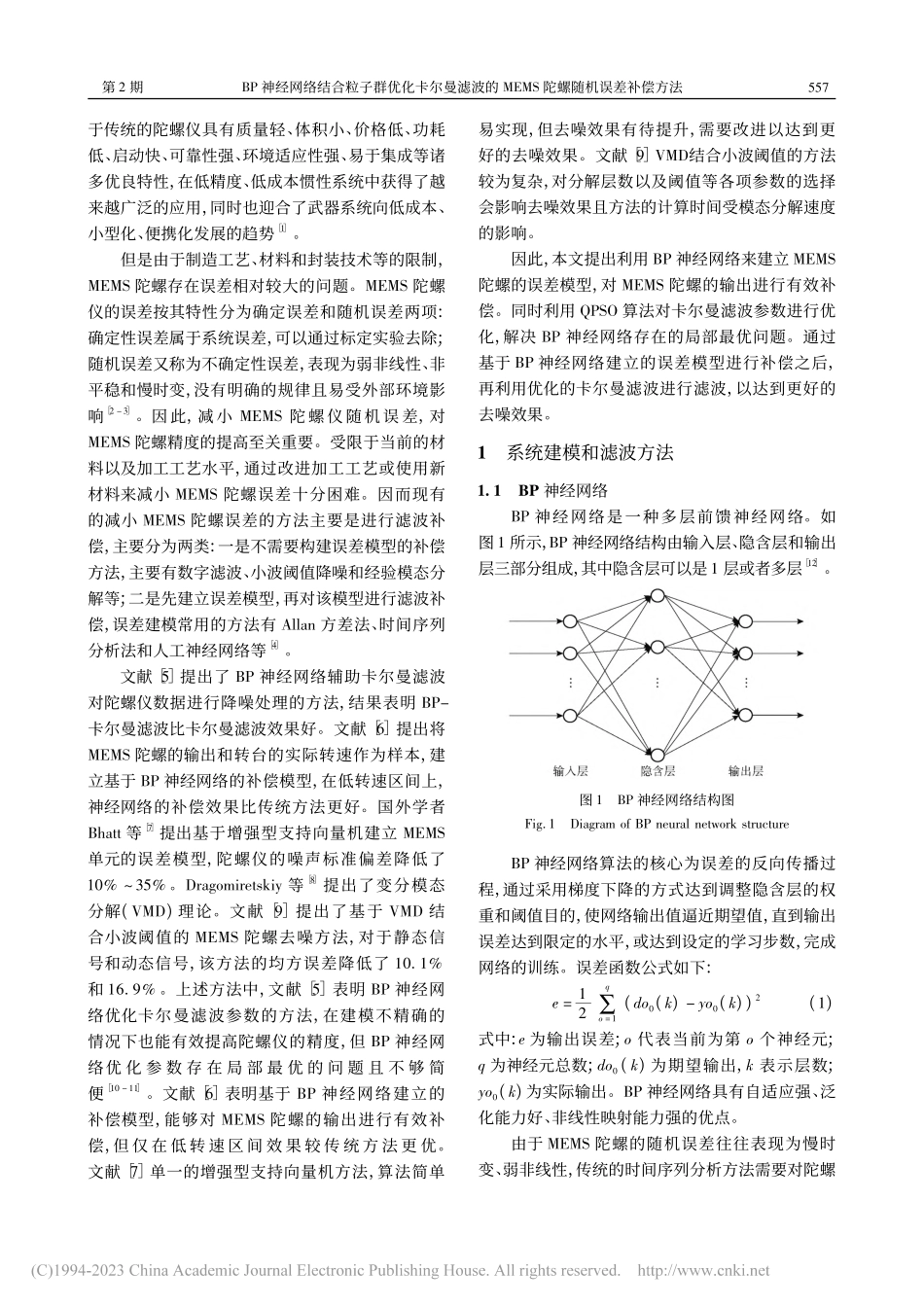
第44卷第2期2023年2月兵工学报ACTAARMAMENTARIIVol.44No.2Feb.2023DOI:10.12382/bgxb.2022.0110BP神经网络结合粒子群优化卡尔曼滤波的MEMS陀螺随机误差补偿方法万芯炜,王晶,杨辉,李毅,张远再,王路(西南技术物理研究所,四川成都610041)摘要:针对微机电系统(MEMS)陀螺仪随机误差相对较大、影响其精度这一问题,提出一种基于BP神经网络结合具有量子行为的粒子群优化(QPSO)算法优化卡尔曼滤波(KF)的补偿方法。采集MEMS陀螺和转台数据作为样本,采用BP神经网络进行训练,建立误差模型;利用训练好的模型对MEMS陀螺进行误差补偿;利用QPSO算法优化KF,以达到更好的降噪效果。实验结果表明,该方法较BP神经网络优化KF、QPSO优化KF与变分模态分解结合小波阈值去噪等方法去噪处理后的平均绝对误差(MAE)和均方误差(MSE)更小,具有更好的降噪效果。关键词:MEMS陀螺;BP神经网络;量子粒子群优化;卡尔曼滤波中图分类号:V241.5文献标志码:A文章编号:1000-1093(2023)02-0556-10ARandomErrorCompensationMethodofMEMSGyroscopeBasedonBPNeuralNetworkCombinedwithPSO-OptimizedKalmanFilterWANXinwei,WANGJing,YANGHui,LIYi,ZHANGYuanzai,WANGLu(SouthwestInstituteofTechnicalPhysics,Chengdu610041,Sichuan,China)Abstract:Todealwiththelargerandomerrorofthemicro-electro-mechanical-system(MEMS)gyroscopethataffectsitsaccuracy,anerrorcompensationmethodbasedonBPneuralnetworkcombinedwithQuantum-behavedParticleSwarmOptimization(QPSO)-optimizedKalmanFilter(KF)isproposed.First,theMEMSgyroscopeandturntabledataarecollectedassamples,andtheBPneuralnetworkisemployedfortrainingtoestablishtheerrormodel;thentheerroroftheMEMSgyroscopeiscompensatedbythemodel;finally,theQPSOalgorithmisusedtooptimizeKFtoachievebetternoisereductioneffect.TheexperimentalresultsshowthatcomparedwithothermethodslikeBP-KF,QPSO-KFandVMD-WTD,thismethodhasbetterdenoisingeffect,andtheMAEandMSEvaluesofthedenoiseddataaresmaller.Keywords:micro-electro-mechanical-systemgyroscope;BPneuralnetwork;quantum-behavedparticleswarmoptimization;Kalmanfilter收稿日期:2022-01-200引言导引头的稳定平台中,速率陀螺输出的角速率信号对于导引头视线角速度的解算至关重要。常见的速率陀螺主要有挠性陀螺、激光陀螺、光纤...