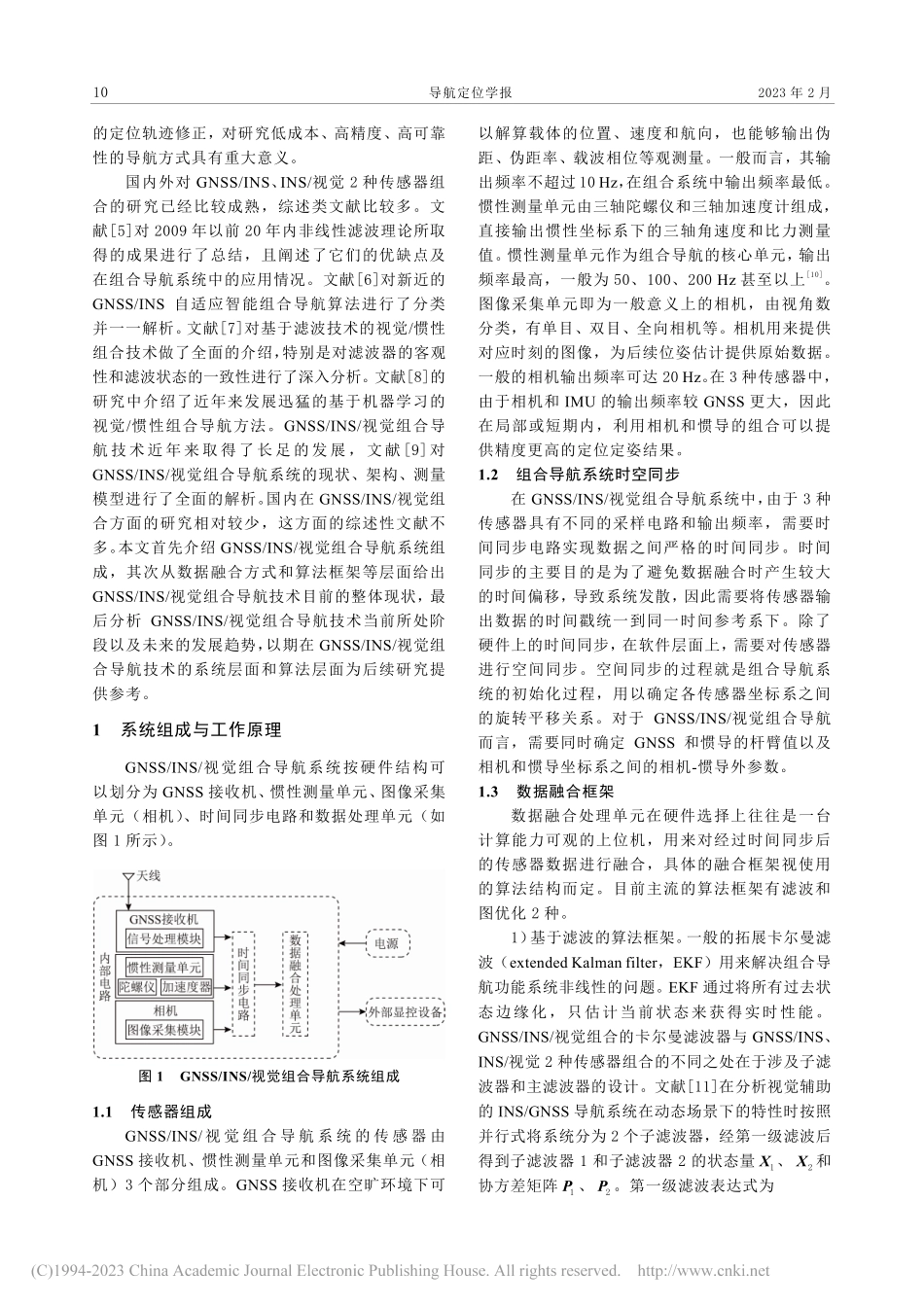
第11卷第1期导航定位学报Vol.11,No.12023年2月JournalofNavigationandPositioningFeb.,2023引文格式:李凯林,李建胜,王安成.GNSS/INS/视觉组合导航数据融合研究探讨[J].导航定位学报,2023,11(1):9-15.(LIKailin,LIJiansheng,WANGAncheng.DiscussionondevelopmentofGNSS/INS/Visualintegratednavigationtechnologyanddatafusion[J].JournalofNavigationandPositioning,2023,11(1):9-15.)DOI:10.16547/j.cnki.10-1096.20230102.GNSS/INS/视觉组合导航数据融合研究探讨李凯林,李建胜,王安成(信息工程大学地理空间信息学院,郑州450000)摘要:为了进一步提高导航定位的可靠性、精度、连续性和完好性,融合各类可用导航传感器构成组合导航系统成为必然趋势;随着全球导航卫星系统(GNSS)终端、惯性导航系统(INS)器件和视觉传感器向模块化、小型化、低成本不断发展,GNSS/INS/视觉组合导航得到了广泛关注。分析其研究进展:通过介绍GNSS/INS/视觉组合系统的基本结构与原理,总结出GNSS/INS/视觉组合系统关键技术发展现状及行业应用情况;然后梳理GNSS/INS/视觉融合架构与典型算法;最后分析GNSS/INS/视觉组合系统中当前存在的主要问题与发展趋势。关键词:组合导航;数据融合;时空同步;联邦滤波;图优化中图分类号:P228文献标志码:A文章编号:2095-4999(2023)01-0009-07DiscussionondevelopmentofGNSS/INS/VisualintegratednavigationtechnologyanddatafusionLIKailin,LIJiansheng,WANGAncheng(InstituteofGeospatialInformation,InformationEngineeringUniversity,Zhengzhou450000,China)Abstract:Inordertofurtherimprovethereliability,accuracy,continuityandintegrityofnavigationandpositioning,itisaninevitabletrendtointegratevariousavailablenavigationsensorsintoanintegratednavigationsystem;furthermore,withthecontinuousdevelopmentofglobalnavigationsatellitesystem(GNSS)terminals,inertialnavigationsystem(INS)devicesandvisualsensorstowardsmodularization,miniaturizationandlowcost,GNSS/INS/visualintegratednavigationhasreceivedextensiveattention.Thepaperanalyzedtheresearchdevelopment:thebasicstructureandprincipleofGNSS/INS/visualintegratedsystemwereintroduced,andthekeytechnologydevelopmentstatusandindustryapplicationoftheintegratedsystemweresummarized;thenthevisualfusionarchitec...