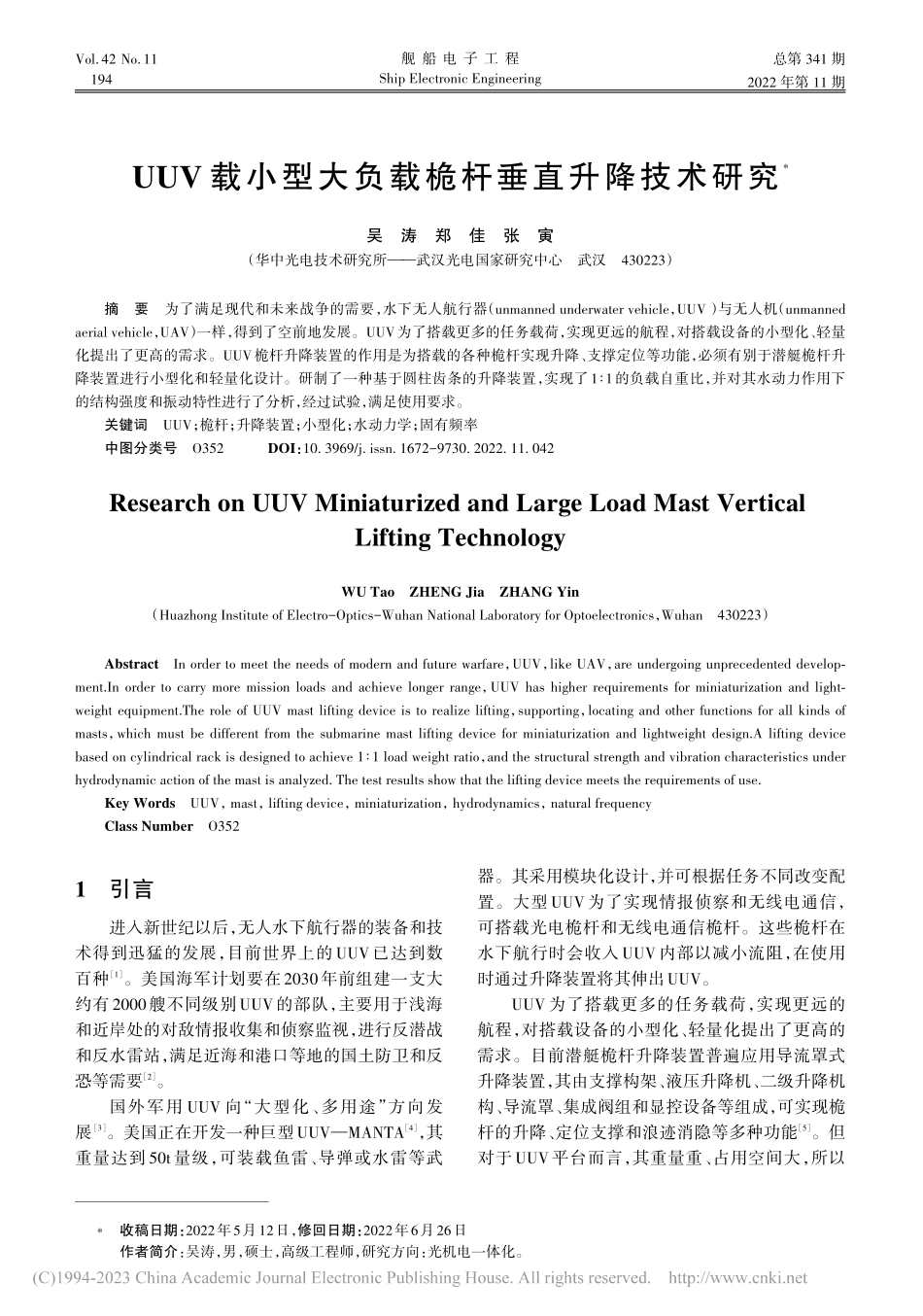
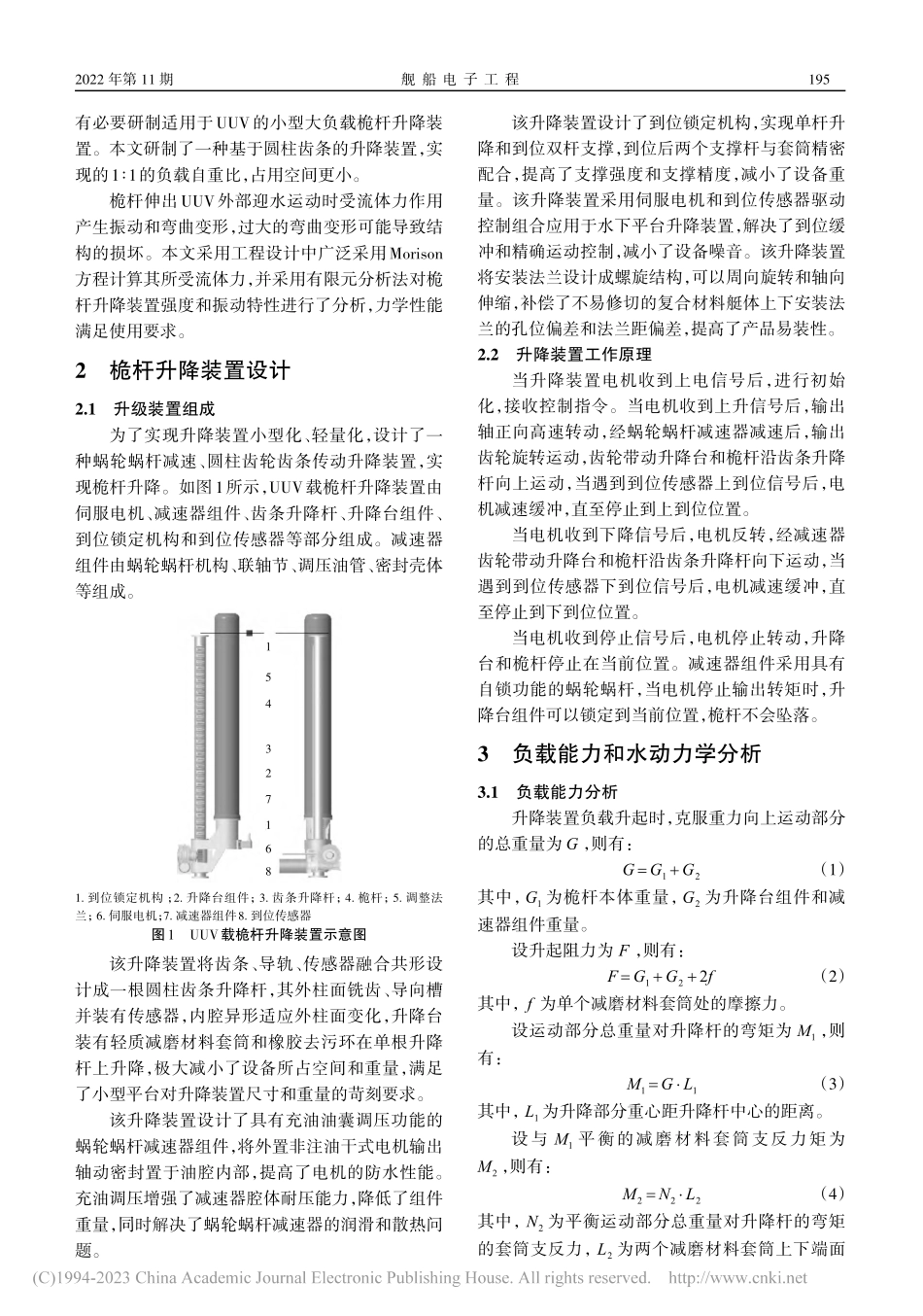
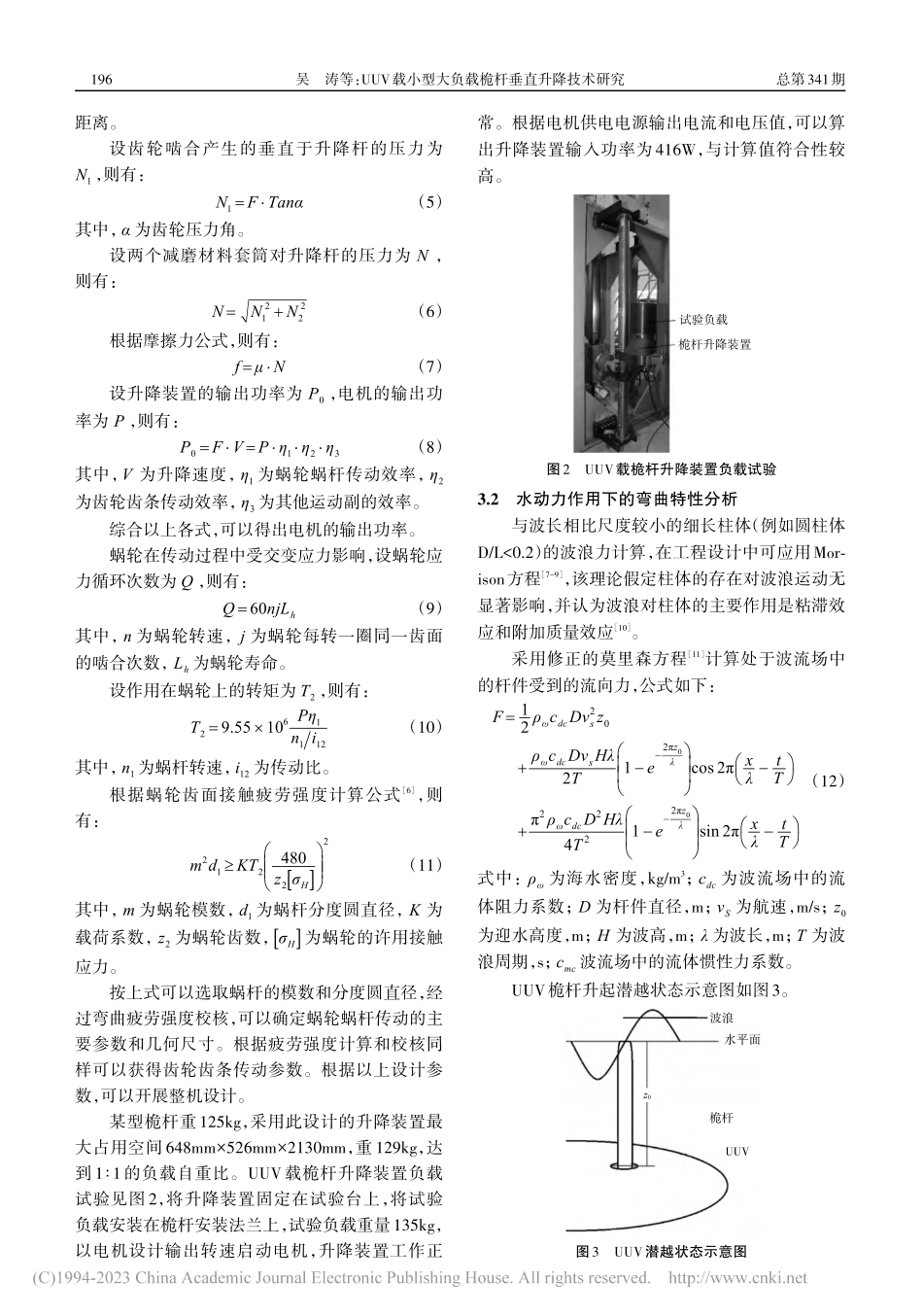
总第341期舰船电子工程ShipElectronicEngineering总第341期2022年第11期Vol.42No.111引言进入新世纪以后,无人水下航行器的装备和技术得到迅猛的发展,目前世界上的UUV已达到数百种[1]。美国海军计划要在2030年前组建一支大约有2000艘不同级别UUV的部队,主要用于浅海和近岸处的对敌情报收集和侦察监视,进行反潜战和反水雷站,满足近海和港口等地的国土防卫和反恐等需要[2]。国外军用UUV向“大型化、多用途”方向发展[3]。美国正在开发一种巨型UUV—MANTA[4],其重量达到50t量级,可装载鱼雷、导弹或水雷等武器。其采用模块化设计,并可根据任务不同改变配置。大型UUV为了实现情报侦察和无线电通信,可搭载光电桅杆和无线电通信桅杆。这些桅杆在水下航行时会收入UUV内部以减小流阻,在使用时通过升降装置将其伸出UUV。UUV为了搭载更多的任务载荷,实现更远的航程,对搭载设备的小型化、轻量化提出了更高的需求。目前潜艇桅杆升降装置普遍应用导流罩式升降装置,其由支撑构架、液压升降机、二级升降机构、导流罩、集成阀组和显控设备等组成,可实现桅杆的升降、定位支撑和浪迹消隐等多种功能[5]。但对于UUV平台而言,其重量重、占用空间大,所以∗收稿日期:2022年5月12日,修回日期:2022年6月26日作者简介:吴涛,男,硕士,高级工程师,研究方向:光机电一体化。UUV载小型大负载桅杆垂直升降技术研究∗吴涛郑佳张寅(华中光电技术研究所——武汉光电国家研究中心武汉430223)摘要为了满足现代和未来战争的需要,水下无人航行器(unmannedunderwatervehicle,UUV)与无人机(unmannedaerialvehicle,UAV)一样,得到了空前地发展。UUV为了搭载更多的任务载荷,实现更远的航程,对搭载设备的小型化、轻量化提出了更高的需求。UUV桅杆升降装置的作用是为搭载的各种桅杆实现升降、支撑定位等功能,必须有别于潜艇桅杆升降装置进行小型化和轻量化设计。研制了一种基于圆柱齿条的升降装置,实现了1∶1的负载自重比,并对其水动力作用下的结构强度和振动特性进行了分析,经过试验,满足使用要求。关键词UUV;桅杆;升降装置;小型化;水动力学;固有频率中图分类号O352DOI:10.3969/j.issn.1672-9730.2022.11.042ResearchonUUVMiniaturizedandLargeLoadMastVerticalLiftingTechnologyWUTaoZHENGJiaZHANGYin(HuazhongInstituteofElectro-Optics-WuhanNationalLaboratoryforOptoelectronics,Wuhan430223)AbstractInordertomeettheneedsofmod...