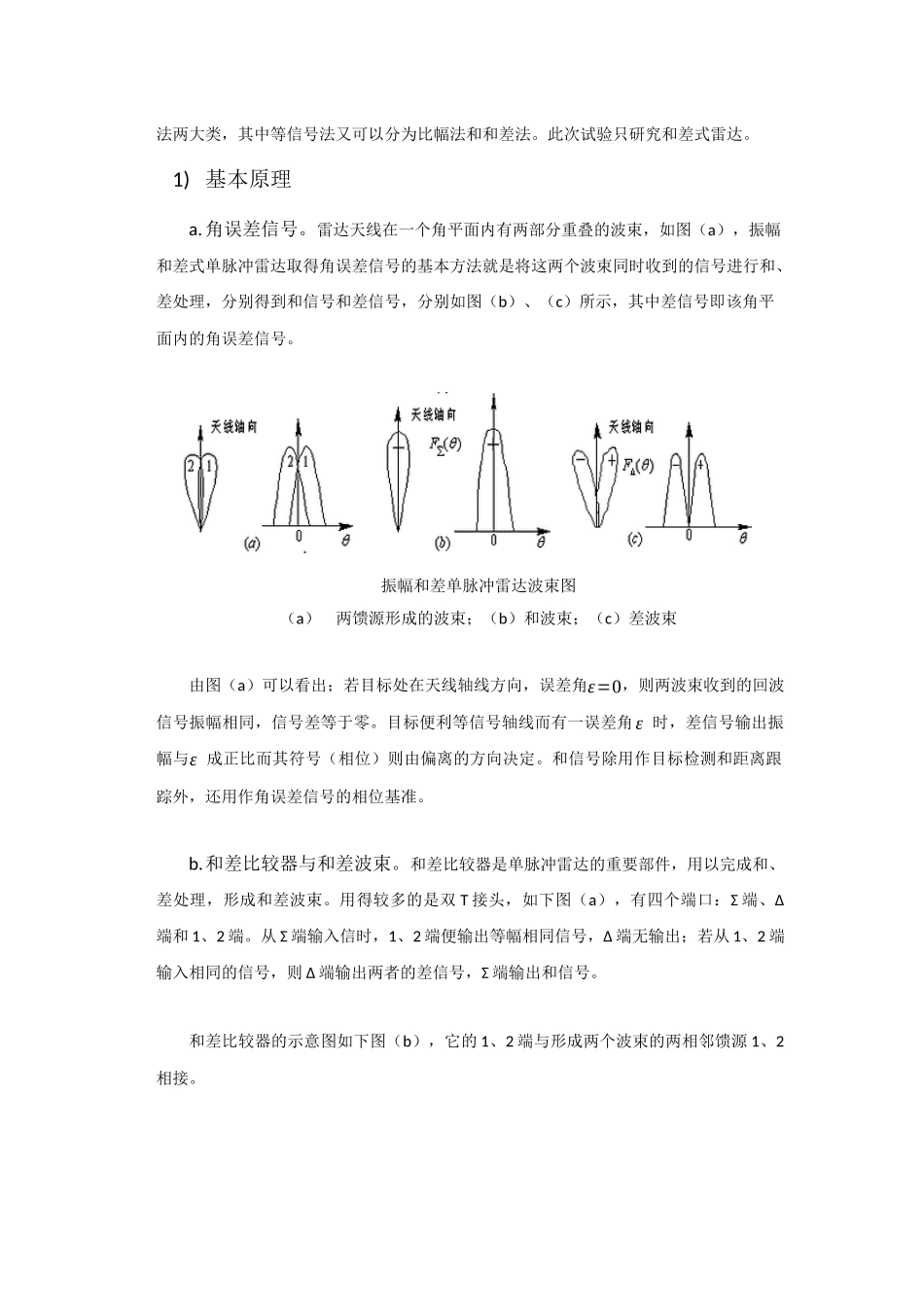
振幅和差单脉冲雷达振幅和差单脉冲雷达在自动测角中的应用姓名:学号:2014-12-20西安电子科技大学信息对抗摘要:在雷达系统中,为了确定目标的位置,不仅需要知道距离参量,同时也需要知道目标的空间方位,为此需要知道目标的方位角和俯仰角。雷达测角的物理基础是电磁波在均匀介质中沿直线传播和雷达天线具有方向性。测角的方法可分为振幅法和相位法两大类。在雷达测角中,为了快速地提供目标的精确坐标值,要采用自动测角的方法。自动测角时,天线能自动跟踪目标,同时将目标的坐标数据传送到计算机中。在自动测角系统中,有一种典型的方式——单脉冲自动测角系统。单脉冲自动测角属于同时波瓣测角法,单脉冲雷达的种类很多,最常用的是振幅和差单脉冲雷达。关键字:雷达自动测角系统振幅和差单脉冲雷达一、单脉冲雷达什么是单脉冲雷达?单脉冲雷达是一种精密跟踪雷达。它每发射一个脉冲,天线能同时形成若干个波束将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。单脉冲雷达通常有振幅比较单脉冲雷达和相位比较单脉冲雷达两大类(本次只研究振幅比较法)。它有较高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达早在60年代就已广泛应用。在军事上主要用于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等;在民用上主要用于中交通管制。二、振幅和差单脉冲雷达振幅定向法是用天线接收到的回波信号幅度值来进行角度测量的,该幅度值的变化规律取决于天线方向图以及天线的扫描方式。振幅定向法可以分为最大信号法和等信号法两大类,其中等信号法又可以分为比幅法和和差法。此次试验只研究和差式雷达。1)基本原理a.角误差信号。雷达天线在一个角平面内有两部分重叠的波束,如图(a),振幅和差式单脉冲雷达取得角误差信号的基本方法就是将这两个波束同时收到的信号进行和、差处理,分别得到和信号和差信号,分别如图(b)、(c)所示,其中差信号即该角平面内的角误差信号。振幅和差单脉冲雷达波束图(a)两馈源形成的波束;(b)和波束;(c)差波束由...